取消
清空記錄
歷史記錄
清空記錄
歷史記錄


取消
清空記錄
歷史記錄
清空記錄
歷史記錄
- 丝袜 亚洲 另类 欧美 | 国产亚洲一卡2卡3卡4卡新区 | 亚洲最大成人免费视频 | 97久久精品国产一区二区片 | 特黄a级片 | 少妇高潮叫床在线播放 | 久久久久网站 | 九色网战 | 精品无码久久久久久久动漫 | 一级黄色的毛片 | 久久99精品国产麻豆婷婷 | 无码超级大爆乳在线播放 | av色综合久久天堂av色综合在 | 国产乱码精品一区二区三 | 巨大乳の超乳を揉んで乳巨在线播放 | 午夜福制92视频 | 色综合 图片区 小说区 | 小毛片网站 | 中文字幕日韩欧美一区二区三区 | 成片免费观看视频大全 | 国产日产欧产精品品不卡 | 青青久草在线 | 欧美肥婆性猛交xxxⅹ | 国产香蕉97碰碰碰视频在线观看 | 91网站在线看 | 国产综合区 | 免费观看成人羞羞视频网站观看 | 久久久精品波多野结衣av | 欧美色第一页 | 韩国精品一区二区三区四区 | 一区在线观看视频 | 成人在线观 | 青青草一区二区三区 | 男女做爰真人视频直播 | av无码午夜福利一区二区三区 | 亚洲自拍偷拍网 | 夜影影视剧大全在线观看 | 欧美色图网址 | 91精品久久久久久久久不口人 | 国产精品久久久久久久久久久新郎 | 久久久999久久久 | 日本污污网站 | 欧美一区二区三区粗大 | 男人的天堂欧美 | 国产精品理人伦一区二区三区 | 国产精品刘玥久久一区 | 国产精品成人一区二区 | 东京热人妻一区二区三区 | 熟女少妇人妻中文字幕 | 一本一道久久综合狠狠老精东影业 | 一级国产精品一级国产精品片 | 精品av熟女一区二区偷窥海滩 | 日韩亚洲精品视频 | 亚洲乱码在线卡一卡二卡新区豆瓣 | 国产成人欧美一区二区三区 | 按摩害羞主妇中文字幕 | 日本中文字幕在线观看视频 | 韩日午夜在线资源一区二区 | 成人免费视频网站 | 午夜视频体内射.com.com | 色啪综合 | 亚洲一区二区三区四区五区不卡 | 伊人春色网 | 国产交换配乱淫视频a | 国内精品久久久久久 | 亚洲精品久久久久久久观看 | 欧美老肥妇做.爰bbww视频 | 中文字字幕在线精品乱码 | 亚欧美日韩香蕉在线播放视频 | 激情一区二区三区 | 中文版在线乱码在线看 | 成人在线影片 | 看曰本女人大战黑人视频 | 40到50岁中老年妇女毛片 | 国产不卡福利片在线观看 | 粉嫩欧美一区二区三区 | 岛国av片在线观看 | 五月婷在线 | a级免费黄色片 | 精品国产va久久久久久久 | 国产麻豆精品av在线观看 | 久久国产精品成人无码网站 | 人成在线免费视频 | 免费中文字幕 | 全亚洲最大的免费影院 | 男男19禁啪啪无遮挡免费 | 亚洲精品图片区小说区 | yy111111少妇影院无码 | 日韩成人在线免费观看 | 亚洲精品久久久久久久久久吃药 | 国产一级一级一级 | 少妇玉梅高潮呻吟 | 欧美交换国产一区内射 | 97成人免费| 久久人爽人人爽人人片av | 精品人妻无码一区二区三区性 | 国产在线播放一区二区三区 | 午夜成人爽爽爽视频在线观看 | 少妇啪啪av入口 | 久久无码中文字幕无码 | 午夜国产在线视频 | 九九精品在线观看 | 国产精品av免费观看 | 国产精品 自在自线 | 中文幕无线码中文字蜜桃 | 黄色在线视频网站 | 久久国产免费看 | 韩国一级淫一片免费放 | 香蕉综合视频 | 李丽珍a级裸体啪啪 | 国精品99久9在线 | 免费 | 不卡一区二区视频日本 | 国产九九| 黄视频国产 | 国产精品vr虚拟专区 | 手机午夜视频 | 久久免费播放 | 女人与公拘交酡全过程 | 亚洲羞羞视频 | 日本脱内衣全部视频 | 婷婷婷国产在线视频 | 国产在线永久视频 | 日本v片做爰免费视频网站 性色欲情网站 | 一区二区三区无码视频免费福利 | 成年动漫av网免费 | 成 人 a v免费视频在线观看 | 91视频国产免费 | 久久婷婷五月综合97色 | 亚洲熟妇丰满大屁股熟妇 | 亚洲成人精品在线 | 五十路熟妇强烈无码 | 久久免费播放视频 | 九色pony麻豆 | 久久无码人妻丰满熟妇区毛片 | 亚洲亚洲人成综合网络 | 亚洲欧美在线免费观看 | 2019最新中文字幕在线观看 | 日本少妇毛茸茸高潮 | 成人第一页 | 色婷久久| 久久精品视频1 | 国产精品jizz在线观看网站 | 性国产丰满麻豆videosex | 国产aa| 亚洲第一成肉网 | 国产精品久久久区三区天天噜 | 亚洲一卡久久 | 久久久亚洲精品av无码 | 青草青草久热 | 强行无套内谢大学生初次 | 国内精品免费久久久久电影院97 | 日本www一道久久久免费榴莲 | 亚洲精品乱拍国产一区二区三区 | 永久免费看成品人影视 | 爱情岛成人18 | 亚洲国产成人aⅴ毛片大全密桃 | 国产美女无遮挡裸色视频 | 亚洲欧美bt | 宅宅午夜无码一区二区三区 | 青青成线在人线免费啪 | 波多野结衣久久 | 内射后入在线观看一区 | 小嫩批日出水视频 | 熟妇人妻无码中文字幕 | 色妞精品av一区二区三区 | 婷婷综合缴情亚洲狠狠 | 亚洲一区无码中文字幕乱码 | 136fldh福利视频导在线 | 中文国产日韩欧美二视频 | 在线观看三区 | 成人免费视频无码专区 | 国产精品99久久久久久久女警 | 欧美bbbb内谢 | 人人曰 | 国产香蕉视频在线 | 热久久亚洲 | 国产超级av| 亚洲日韩欧美国产另类综合 | 国产91精品一区二区绿帽 | 久久国产色av免费看 | 国产女无套免费网站 | 国产无套白浆一区二区 | 日本19禁啪啪吃奶大尺度 | 久青草影院| 国产女人高潮抽搐叫床涩爱小说 | av在线综合网 | 成年视频在线播放 | 日韩人妻熟女中文字幕aⅴ春菜 | 国内外免费激情视频 | 欧美日韩中文在线观看 | 91久久国产露脸精品国产闺蜜 | 绯色av蜜臀vs少妇 | www.国产视频 | 欧美日韩123区 | av在线播放国产 | 久久国内精品自在自线图片 | 国产精品xvideos88 | 9色av| 刺激性视频黄页 | 精品国产拍国产天天人 | 国产av亚洲精品ai换脸电影 | 欧美疯狂做受xxxx高潮小说 | 亚洲精品无码永久在线观看男男 | 红猫大本营在线观看的 | 成年女人免费毛片视频永久vip | 久久久久黄 | 杨贵妃情欲艳谭三级 | 成年女人黄网站色视频免费97 | 91网站最新地址 | 成年人视频在线看 | 久久永久免费人妻精品直播 | 东热ca大乱合集 | 色综合色国产热无码一 | aaa一级黄色片 | 亚洲国产精品久久久久久6q | 久久夜色精品国产www红杏 | 大尺度做爰床戏呻吟舒畅 | 深夜网站在线观看 | 国产自啪精品视频网站丝袜 | 精品日产卡一卡二卡927 | 男ji大巴进入女人的视频小说 | www天天射 | 亚洲成人观看 | 中文精品久久久久人妻不卡 | 一区二区视频网站 | 日本做爰高潮视频 | 久久国内精品自在自线图片 | 欧美日韩一区二区免费视频 | 日韩欧美在线视频播放 | 国产一女三男3p免费视频 | 日本做爰xxxⅹ高潮欧美 | 精品视频一区二区三区四区戚薇 | 成人资源在线 | 亚洲高清在线观看视频 | 日本大片在线播放在线软件功能 | 国产伦精品一区二区三区视频金莲 | 激情视频一区 | 另类三区 | 一级猛片免费看 | 香蕉视频网站入口 | 青草青草视频2免费观看 | 国产片久久久 | 波多野结衣精品在线 | 日本精品一区二区三区视频 | 强辱丰满人妻hd中文字幕 | 97成人精品 | 二级大黄大片高清在线视频 | 国产欧美日韩在线中文一区 | 色姑娘综合 | 国语少妇高潮对白在线 | www视频一区 | 午夜激情综合网 | 小早川怜子avhd肉厚一区 | 久久黄色av| 亚洲产国偷v产偷v自拍色戒 | 精品三级久久久久电影网 | 国产成人久久av免费高清蜜臀 | a级老太婆毛片老太婆毛片 国产综合区 | 国产激情免费 | 天堂资源wwwav啪啪 | 三级三级三级三级 | 色综合av综合无码综合网站 | 日日碰日日摸夜夜爽无码 | 欧美另类tv | 国产精品麻豆成人av电影 | 黑人巨大99vs小早川怜子 | 在线综合亚洲欧美日韩 | 国产午夜伦鲁鲁 | 成人性生交大片免费4 | 亚洲国产熟妇无码一区二区69 | 国产精品无码久久综合 | 国内精品伊人久久久久av一坑 | 九九操| 国产成人一区二区三区影院动漫 | 日韩av一区二区在线 | 在线永久看片免费的视频 | 亚洲а∨天堂2019无码 | 欧州一区 | 看日本毛片 | 日韩av大片在线观看 | 日本护士被弄高潮视频 | 人妻互换免费中文字幕 | 台湾150部性三级 | 久久精品国产亚洲欧美成人 | 性视频在线 | 国产精品av久久久久久小说 | 九一九色国产 | 国产精品一二三区在线观看 | 久久国产精品久久国产精品 | 国内熟妇人妻色在线视频 | 亚州欧洲日韩精品 | 久久精品亚洲精品无码 | 簧片av | 亚洲激情视频网 | 少妇午夜性影院私人影院软件 | 天天舔天天射 | 少妇一级淫片免费放 | 国产日韩在线欧美视频 | 国产精品美女毛片真酒店 | 一 级 黄 色蝶 片 | 亚洲视频一二区 | 91精品国产91久久久久久 | 国产一区二区三区又黄又爽 | 色欲av亚洲一区无码少妇 | 日本熟妇色一本在线视频 | 亚洲成a人无码av波多野 | 玖玖精品在线视频 | 丰满少妇猛烈进入三区视频 | 窝窝午夜理论片影院 | 色婷婷视频在线 | 波多野42部无码喷潮 | 国产无遮挡又黄又大又爽 | 亚洲五月综合 | 亚洲亚洲中文字幕无线码 | 丰满的继牳3中文字幕系列 国产高清中文手机在线观看 | 免费人成视频在线观看视频 | 欧美色图一区二区三区 | 天堂8中文在线最新版在线 国产日韩欧美91 | 麻豆国产人妻欲求不满谁演的 | 日本理论片中文字幕 | 情侣偷偷看的羞羞视频网站 | 青青狠狠噜天天噜日日噜 | 污污视频网站在线 | 久久91久久 | av综合网男人的天堂 | 国产又爽又大又黄a片软件 中文字幕欧美人妻精品一区 | 欧美伊人色综合久久天天 | 97人人爽人人 | 免费a级片在线观看 | 日韩av一卡二卡 | 精品国产乱码一区二区三区 | 暖暖视频日本在线观看免费hd | 校园春色~综合网 | 老司机亚洲精品影院 | 日本大人吃奶视频xxxx | 色射视频 | 女人天堂一区二区三区 | 成年人视频在线看 | 欧美高清熟妇啪啪内射不卡自拍 | 亚洲成av人片一区二区梦乃 | 视频在线一区二区 | 成人在线免费观看网站 | 狠狠色成人一区二区三区 | 亚洲不乱码卡一卡二卡4卡5 | 99网曝精品视频久草 | 久久黄色一级视频 | 国产伦子伦视频在线观看 | 日本最大色倩网站www | 东京天堂热av | 国产成人精品午夜福利在线观看 | 精品无码人妻夜人多侵犯18 | 亚洲日本精品国产第一区二区 | 亚洲日本区 | 日本高清免费视频 | 欧美三级中文字幕在线观看 | 午夜毛片在线观看 | 国产精品一区二区三区四 | 91黄色在线视频 | 国产一区二区亚洲 | 91免费国产视频 | 三级在线看中文字幕完整版 | 人妖天堂狠狠ts人妖天堂狠狠 | 亚洲成人中文字幕 | 国产丝袜一区二区三区免费视频 | 一区二区三区欧美 | 成年人视频网址 | 97日日碰曰曰摸日日澡 | 午夜影视啪啪免费体验区 | 国内精品久久人妻无码妲己 | 久久精品人人看人人爽 | 少妇高潮叫床在线播放 | av国産精品毛片一区二区网站 | 人妻少妇精品无码专区芭乐视网 | 午夜精品免费视频 | 国产三级精品三级在专区 | 国产精品一区二三区 | 国产乱对白刺激在线视频 | 日韩精品一区在线 | 国产在线视欧美亚综合 | 国产天天骚 | 亚洲国产精品国语在线 | 伊人久久亚洲精品一区 | 黄色工厂这里只有精品 | 蜜桃av噜噜一区二区三 | 亚洲高清乱码午夜电影网制服 | 欧美午夜刺激影院 | 一本大道av伊人久久综合 | 水蜜桃精品一二三 | 国产精品久久久久久日本 | 亚欧乱色熟女一区二区三区 | 日本中文字幕乱码aa高清电影 | 日韩精品一区国产偷窥在线 | av网站免费看 | 日韩精品一卡2卡3卡4卡分类 | 制服丝袜人妻有码无码中文字幕 | 久久草草精品入口av | 国产奶水涨喷在线播放 | 国产成人精品日本亚洲 | 欧美成人午夜免费视在线看片 | 女m羞辱调教视频网站 | 天天干天天色 | 丁香五月亚洲综合在线 | 69伊人 | 国产一级片av | 欧美亚洲日本高清不卡 | 午夜人成免费视频 | 日本高清无卡码一区二区久久 | 精品亚洲午夜久久久久91 | 国产精品黑色丝袜在线观看 | 成人性生交大片免费看中文视频 | 日日噜噜夜夜狠狠va视频v | 特黄特色大片免费播放叫疼 | 精品久久久久久久久久久国产字幕 | 成年人黄色毛片 | 色婷婷精品大在线视频 | 欧美精品中文字幕亚洲专区 | 亚洲中文字幕国产综合 | 国产精品视频专区 | 国产精品欧美成人 | 午夜片神马影院福利 | 肉丝一区二区 | 少妇高潮九九九αv | 精品视频一区二区三区在线观看 | 久久中文字幕人妻熟av女 | 日本乱码一区二区三区不卡 | 真实国产熟睡乱子伦视频 | 吃奶摸下激烈视频学生软件 | 国产精品美女www爽爽爽三炮 | 果冻传媒色av国产在线播放 | 一本之道ay免费 | 日韩二区在线 | 毛茸茸熟妇丰满张开腿呻吟性视频 | 精品国产午夜福利精品推荐 | 亚洲综合人成网免费视频 | 精品久久久久久中文墓无码 | 国产高清午夜人成在线观看 | 麻豆国产成人av高清在线观看 | 日日摸夜夜添夜夜添毛片av | 精品一区三区 | 中国黄色录像 | 亚洲人成电影在线观看影院 | 欧美黑人巨大videos精品男男 | 九九综合视频 | 操碰97| 欧美内射rape视频 | 欲色影视天天一区二区三区色香欲 | 国产成人精品福利一区二区三区 | 国产片av在线观看精品免费 | 91av在线看| 少妇高潮喷水久久久久久久久久 | 99精品人妻少妇一区二区 | 久久精品无码一区二区小草 | 4438x成人网一全国最大色成网站 | 又爽又高潮视频a区免费看 国产精品人妻一区夜夜爱 香蕉视频在线观看免费 | 日韩欧美一区二区三 | 91精品欧美一区二区三区 | 先锋影音av最新资源网 | 丰满蕾丝乳罩少妇呻吟91 | 亚洲成a人片在线观看的电影 | 国产精品一区二区久久乐夜夜嗨 | 免费国产又色又爽又黄的软件 | 一天天影影综合网 | www国产内插视频 | 久久精品国产免费 | 九九视频免费观看 | 九九九久久久久 | 草草影院在线观看 | 91美女片黄在线观看 | 69精品国产 | 妇女bbbbb撒尿正面视频 | 鲁一鲁天天 | 久久精品中文无码资源站 | 成年性生交大片免费看 | 蓝av导航a√第一福利网 | 日日爱视频| 国产精品无码aⅴ嫩草 | 久久精品第一国产久精国产宅男66 | 一级aaa级毛片午夜在线播放 | 一区二区三区久久久 | 91久久久精品 | 亚洲精品久久久久久中文字幂 | 亚欧成人在线 | 久久丁香五月天综合网 | 国产高清-国产av | 天天做天天大爽天天爱 | 四虎免费大片aⅴ入口 | 亚洲国产精品久久一线不卡 | 亚洲春色在线观看 | y111111少妇蜜桃视频 | 日韩精品一二 | 国产精品人成电影在线观看 | 国产黄网免费视频在线观看 | 美国免费黄色片 | 成年无码av片在线蜜芽 | 麻豆妓女爽爽一区二区三 | 久久精品久久久 | 国产精品主播在线 | 国产极品美女高潮抽搐免费网站 | 最新国产乱人伦偷精品免费网站 | 色香欲天天天影视综合网 | 欧美视频二区欧美影视 | 国产成人在线免费观看 | 国产精品亚洲专区无码web | 国产成人福利在线视频播放下载 | 人善交另类亚洲重口另类 | 老熟女乱婬视频一区二区 | 久久夜色精品国产噜噜av小说 | 另类亚洲激情 | 欧美日韩在线视频一区 | 狠狠一区 | 日本欧美一级片 | 真多人做人爱视频高清免费 | 操三八男人的天堂 | 亚洲精品a区 | 成年人在线免费观看视频网站 | 欧美另类tv | 国产日韩欧美91 | 日本xxxxl码在中国是几码 | 国产日韩中文字幕 | 青青视频在线观看免费2 | 国产高清精品一区二区三区 | 色一情一乱一伦一视频免费看 | 真实国产乱子伦对白在线播放 | 日韩两性视频 | 日本三级吃奶乳视频在线播放 | 中文精品一区二区三区四区 | 四虎黄色网 | 99久久久无码国产精品 | 午夜激情在线观看 | 黄色网址国产 | 日本熟妇色xxxxx日本妇 | 欧洲丰满少妇a毛片 | 四虎国产精品永久在线下载 | 影音先锋啪啪av资源网站app | 欧美大屁股xxxx高跟欧美黑人 | 国产午夜精品18久久蜜臀董小宛 | 久久久91精品 | 久久久精品人妻无码专区不卡 | 一边吃胸一边揉下面的视频 | 国产精品一区在线蜜臀 | 一边吃胸一边揉下面的视频 | 日本www.在线中文字幕 | 99亚洲精品卡2卡三卡4卡2卡 | 91精品国产乱码久久久久久久久 | 免费观看一级视频 | 爱爱视频网站免费 | 欧美精品videos另类 | 国产精品13p | 成人区精品一区二区不卡 | 红桃视频一区 | 国产成人理论在线观看视频 | 内射中出日韩无国产剧情 | 亚洲噜噜狠狠网址蜜桃av9 | 国产精品爽爽久久久久久无码 | 国产一级特黄aa大片出来精子 | 亚洲欧美校园春色 | 欧美精品色呦呦 | av免费无码天堂在线 | 亚洲 熟女 久久 国产 | 久久久亚洲欧洲日产无码av | 国产大片内射1区2区 | 一级黄色美女 | 上原瑞穗av在线播放 | 思思久婷婷五月综合色啪 | 无码人妻精品一区二区三区蜜桃 | 久久一区二区三区四区五区 | 日韩在线不卡av | 91福利网站 | 欧美日韩亚洲中文字幕一区二区三区 | 亚洲麻豆av | 成年人小视频网站 | 精品视频一区二区三区中文字幕 | 最新三级av | www美色吧com| 国产高清网站 | jizz性欧美2 日韩免费大片 | 欧美片网站yy| 性中国少妇熟妇xxxx农村 | 熟女人妻av完整一区二区三区 | 好爽进去了视频在线观看国版 | 欧美动态色图 | 男女深夜福利 | 亚洲综合憿情五月丁香五月网 | 久久99网 | 十八禁无码免费网站 | 女女女女女裸体开bbb | 天堂а√在线地址 | 日本乱妇乱子视频 | 亚洲香蕉伊综合在人在线观看 | 午夜a区 | 成熟交bgmbgmbgm在线 | 精品久久人妻av中文字幕 | 狠狠综合久久久久尤物 | 亚洲中文字幕人成乱码 | 最新国产久免费视频在线观看 | 国产大学生粉嫩无套流白浆 | 无码夜色一区二区三区 | www17ccom小草影视 | 黄色一级在线视频 | 亚洲中文有码字幕日本第一页 | 岛国av无码免费无禁网站麦芽 | 国产a国产| 久久久久综合网 | 天天干天天摸 | 午夜尤物禁止18点击进入 | 尹人香蕉久久99天天拍 | 久久久国产精品一区二区三区 | 日本欧美一级片 | 日韩精品一区二区三区免费视频观看 | 囯产精品一区二区三区线 | 久9精品 | 嫩草国产福利视频一区二区 | 婷婷久久综合网 | 亚洲精品国产欧美 | 色婷婷综合中文久久一本 | 亚洲国产成人综合在线观看 | 乱码精品国产成人观看免费 | 国产精品嫩草影院九色 | 午夜男人网 | 五月婷在线观看 | 亚洲a∨国产av综合av下载 | 黄色一级片在线免费观看 | 亚洲伊人五月丁香激情 | 视频一区二区三区四区五区 | 91大神网址 | 亚洲日韩欧美一区二区在线 | 97人人草 | 精品国产乱码一区二 | 成人在线观看网址 | 亚洲图片小说激情综合 | 日本久久久www成人免费毛片丨 | 桃色一区 | 岛国精品一区 | 上原亚衣加勒比在线播放 | 国产丝袜视频在线 | 日本三线免费视频观看 | 特级黄aaaaaaaaa毛片 | 国产熟妇按摩3p高潮大叫 | 成年人视频免费在线观看 | 激情内射人妻1区2区3区 | 淫片网站 | 欧美专区亚洲专区 | 妇女性内射冈站hdwww000 | 黄色一级国产 | 国产精品嫩草影院久久久 | 国产精品福利小视频 | 男女免费观看在线爽爽爽视频 | 夜夜高潮夜夜爽夜夜爱 | www.欧美色图 | 免费国产精品视频在线 | 香蕉久久夜色精品国产尤物 | 亚洲综合网国产精品一区 | 日本免费视频 | 久久久五月 | 国产精品欧美亚洲777777 | 国内最真实的xxxx人伦 | 国产精品色无码av在线观看 | 亚洲色偷偷色噜噜狠狠99网 | 国产欧美日韩综合精品一区二区 | 99精品免视看 | 热热99 | 亚洲成av人片在线观看 | 一久久久| 人妻少妇伦在线无码 | 免费看国产曰批40分钟 | 日本一级大毛片a一 | 四虎精品成人影院在线观看 | 日韩欧美久久 | 亚洲色无码专区一区 | 伊人久久大香线蕉综合影视 | 国产女人在线视频 | 最新中文字幕av无码不卡 | 男人av网站 | 日本大乳奶做爰洗澡三级 | 天天爽天天爽夜夜爽毛片 | 午夜熟女毛片蜜桃传媒 | 国产三级不卡在线观看视频 | 人妻聚色窝窝人体www一区 | www久久国产| 国产精品久久影院 | 91视频大全 | 夜夜躁狠狠躁日日躁av | 国产一卡二卡在线 | 男人添女人下部高潮全视频 | 成人亚洲一区二区 | 欧洲一级片 | 91pony九色丨交换 | 国产激情大臿免费视频 | 欧美爱爱网| 国产一级特黄毛片在线毛片 | 亚洲精品国偷拍自产在线观看蜜桃 | 久久久精品久久久久久 | 欧美黄色一级视频 | 国产成人女人在线观看 | 成人一级影视 | 久久无码中文字幕免费影院蜜桃 | 欧美熟妇的荡欲在线观看 | 999精品在线 | 成人免费无码大片a毛片直播 | 亚洲精品成人网线在线播放va | 欧美高清freexxxx性 | 91精品综合久久久久m3u8 | 无码专区3d动漫精品免费 | 国产xxxx做受视频 | 免费人成网站视频在线观看 | 国产一区二区女内射 | 国产乱妇乱子在线播放视频 | 日韩黄网站 | 国产男女猛烈无遮挡免费视频 | 人妻中文字幕无码专区 | 日日夜夜中文字幕 | 亚洲乱码中文字幕久久孕妇黑人 | 九九热精品在线观看 | 日日夜操 | 国产瑟瑟视频 | 一级黄色片在线播放 | 日韩亚洲精品视频 | 日本黄页网站免费观看 | 久艾草久久综合精品无码 | 国产精品国产三级国快看 | 老司机狠狠爱 | 国产91亚洲精品 | 草草影院发布页 | 片毛片| 国产av亚洲精品久久久久久 | 欧美久久视频 | 亚洲欧美日本久久综合网站点击 | 亚洲欧洲日产国产 最新 | 热久久精 | 久久久久久久久久久网 | 亚洲人性xxⅹ猛交 | 国内精品久久久久av福利秒拍 | 中文精品久久久久国产网址 | 国产玉足脚交极品在线播放 | caoporn国产精品免费公开 | 在线观看日韩av | 91精品乱码久久蜜桃 | 好了av在线第四站综合网站 | 国产成人综合久久精品免费 | 二区三区在线观看 | 强迫凌虐淫辱の牝奴在线观看 | 国产欧美黑寡妇久久久 | 素人在线观看免费视频 | 88国产精品欧美一区二区三区 | 中国一级特黄真人毛片 | 国产又粗又猛又爽又黄的网站 | 成人免费无码大片a毛片户外 | 黄色免费成人 | 日本少妇性高潮 | 成人欧美一区二区三区黑人 | 一区二区三区精品视频免费播放 | 丰满大肥婆肥奶大屁股 | 色狠狠色噜噜av天堂一区 | 国产精品国产三级国产密月 | 不用播放器av | 成人乱码一区二区三区av66 | 少妇视频在线 | youjizz.com自拍 | 久久99蜜桃综合影院免费观看 | 九九色综合 | 午夜高清视频 | 欧美成人亚洲高清在线观看 | 亚洲中文字幕无码久久精品1 | 四虎新网址 | 无码人妻出轨黑人中文字幕 | 久久精品国产精品亚洲精品 | 中文字幕亂倫免賛視頻 | 亚洲国产v | 日本特黄特刺激一级猛片 | 黄色资源在线 | 青娱乐国产精品 | www成人在线视频 | 免费一级淫片红桃视频 | 亚洲毛片在线观看 | 九九热精品视频在线观看 | 一本久道视频无线视频 | 精品丝袜人妻久久久久久 | 国产青青青| 免费人成网站 | 成人91看片| 女人摸下面自熨视频在线播放 | 日韩欧美国产aⅴ另类 | 中文日本在线 | 国产精品96久久久久久久 | 国产美女精品视频国产 | 久久久久影院美女国产主播 | 色一情一伦一子一伦一区 | 内射精品无码中文字幕 | 精品国产一区二区三区av 性色 | 青青草国产免费久久久下载 | 亚洲成在人线在线播放无码 | 一级少妇片| 九九免费视频 | 欧美成人午夜免费视在线看片 | 国产成人精品免费视频大全五级 | 国产女人喷潮视频免费 | 国产又粗又猛又爽又黄的视频软件 | 久久国产精品大桥未久av | 最新国产麻豆aⅴ精品无码 国产精品免费久久 | 一卡二卡3卡四卡网站精品 国产剧情一区在线 | 亚洲黄色成人 | aa黄色大片 | 成品片a人免费进入 | 爱吃波客今天最新视频 | 综合精品欧美日韩国产在线 | 亚洲色成人网站在线观看 | 爱爱视频在线免费观看 | 免费做a爰片久久毛片a片 | 精品国产乱码久久久久久老虎 | 国产三级视频 | 国产精品美女久久久久av福利 | 久久这里只有精品23 | 亚洲无吗在线视频 | 午夜精品久久久久久不卡 | 国产精品播放 | 久久久影院 | 一本色道无码不卡在线观看 | 久久精品国产亚洲精品 | 在线观看视频www | 国产精品尤物yw在线观看 | 鲁丝一区二区三区 | 国产性生活 | 亚洲 欧美 另类 综合 偷拍 | 97无码免费人妻超级碰碰夜夜 | 国产麻豆剧果冻传媒兄妹蕉谈 | 婷婷四月开心色房播播网 | 日本大香伊一区二区三区 | 亚洲另类春色国产精品 | 99视频在线精品免费观看2 | 日韩欧美亚洲 | 精品入口麻豆88视频 | 亚洲国产av精品一区二区蜜芽 | 天天干天天曰 | 国产黄色网 | 国产在线视频国产永久 | 亚洲人成网站免费播放 | 一级黄色国产片 | 精品国产1区2区3区 九九九精品成人免费视频小说 | 中文字幕不卡乱偷在线观看 | 一 级 黄 色蝶 片 | 成人免费版| 新香蕉视频 | 无码精品a∨在线观看十八禁 | www天堂avcom| 国产精品入口传媒小说 | 7777奇米四色成人眼影 | 国产欧美日韩在线中文一区 | 免费吃奶摸下激烈视频 | 97色伦图| 天堂视频免费在线观看 | 国产系列丝袜熟女精品网站 | 亚洲国产一区在线 | 国产成人精品免费视频app软件 | 日本在线观看 | 亚洲最大的成人网 | 日本少妇一级片 | 沈阳熟女露脸对白视频 | 狠狠躁夜夜躁人人爽天天不 | 欧美日韩一区二区在线播放 | 特黄aaaaaa私密按摩 | 99在线精品一区二区三区 | 69色| 噜噜噜噜香蕉私人 | 少妇一区二区视频 | 校园春色亚洲激情 | 性调教学院高h学校 | 国产高清成人久久 | 久久久久久久女女女又又 | 国产第6页 | 亚洲成色在线综合网站2018 | 亚洲性视频网站 | 午夜在线免费观看视频 | 国产精品成人免费视频网站京东 | 一本一道vs无码中文字幕 | 免费在线观看的黄色网址 | 亚洲精品无码久久毛片波多野吉衣 | 亚洲精品一卡二卡 | 国产成人a亚洲精v品无码 | 久久新视频 | 蜜臀久久99精品久久一区二区 | 国产精品一v二v在线观看 | 欧美巨大另类极品videosbest | 西西人体午夜视频无码 | 久久精品天天中文字幕人妻 | 福利免费观看午夜体检区 | 强迫凌虐淫辱の牝奴在线观看 | 亚洲国产精品欧美久久 | 鲁鲁网亚洲站内射污 | 麻豆影视| 免费在线激情视频 | 久久好在线视频 | 亚洲在线视频免费观看 | 久热这里只精品99国产6 | 91久 | 久久青青草原av免费观看 | 中文无码vr最新无码av专区 | 99久久一区二区 | 风间由美乳巨码无在线 | 男女做爰猛烈叫床爽爽免费网站 | 青草伊人网 | 青青草国产精品人人爱 | 欧美亚洲福利 | 99热国产| 欧美特一级片 | 欧美牲交a欧美牲交aⅴ图片 | 午夜yyy黄a一区二区三区 | 亚洲国产欧美精品 | 97视频久久 | 国产午夜精品一区二区三区嫩草 | 欧美伦理一区二区 | 噜噜噜av久久av苍井空 | 亚洲激情综合 | 色六月婷婷 | 国产亚洲精品久久久久久床戏 | 孕妇爱爱视频 | 久久免费看少妇高潮v片特黄 | 亚洲国产精品肉丝袜久久 | 中字幕视频在线永久在线观看免费 | 欧美成人精精品一区二区频 | 国模大胆无码私拍啪啪av | 香港三日本三级少妇三级视频 | 少妇毛片久久久久久久久竹菊影院 | 久久久久女人精品毛片 | 超碰97久久国产精品牛牛 | 成人免费色视频 | 久久精品中文闷骚内射 | 国产v片在线播放 | 人妻无码中文字幕永久有效视频 | 国产网站精品 | 91mvcool在线观看 | 玖玖爱国产 | 国语自产拍在线视频中文 | 少妇裸体婬交视频免费看 | 国产精品兄妹在线观看麻豆 | www亚洲视频com | 日韩无码电影 | 亚洲欧美伊人久久综合一区二区 | 少妇高潮av久久久久久 | 性猛交ⅹxxx乱大交大片 | 97人摸人人澡人人人超一碰 | 欧美影院在线 | 免费精品国产人妻国语色戒 | 久热这里有精品 | 69日本xxxxxxxxx30| 亚洲激情视频 | 草久av | 成本人妻片无码中文字幕免费 | 中文字幕av影片 | 任你躁在线精品免费 | 福利cosplayh裸体の福利 | 国产jjizz女人多水 | 女人和拘做爰正片视频 | 日韩激情在线 | 四虎影视免费观看 | 东北老女人高潮久久91 | 日日摸夜夜添狠狠添久久精品成人 | 理论在线视频 | 国产卡一卡二 | 中文无码成人免费视频在线观看 | 麻豆精品人妻一区二区三区蜜桃 | 丰满人妻av无码一区二区三区 | 人妻 丝袜美腿 中文字幕 | 欧美成人一二区 | 久久99精品国产91久久来源 | 国产熟妇另类久久久久久 | 午夜福利电影网站鲁片大全 | 亚洲一区二区蜜桃 | 成人国产精品一区二区免费看 | 中文字幕永久在线播放 | 精品国产91久久久久 | 亚洲性夜夜摸人人天天 | 18禁超污无遮挡无码免费动态图 | 国产成人愉拍精品久久 | jizzjizz免费 | 国产视频首页 | 国产高清999 | 女人爽到高潮的免费视频 | 国产麻豆免费视频 | 国产一区二区三区乱码在线观看 | 无码人妻h动漫中文字幕 | 亚洲精品a | 日屁视频| 欧美狠狠| 国产欧美在线一区二区三 | 亚洲国产成人欧美激情 | 亚洲看片网站 | 美女视频黄a视频免费全程软件axs | 欧美精品色 | 无码国内精品久久综合88 | 久久精品国产精品亚洲蜜月 | 十八女人水多三级 | 日韩精品―中文字幕 | 欧美成人亚洲高清在线观看 | 无码人妻精品一区二区三区9厂 | 91九色丨porny丨朋友 | 无码一区二区三区老色鬼 | 老头糟蹋新婚少妇系列小说 | 免费福利在线 | 午夜精品小视频 | 亚洲日本中文字幕在线四区 | 日韩一卡二卡三卡 | 三级毛片av | 国产成人精品一区二 | 精品综合网 | 成a人v| 国产老太睡小伙子视频 | 在线观看欧美亚洲 | 男人的天堂视频 | 夜夜爽77777妓女免费看 | 久久久av片 | 92精品 | 无码成人av在线一区二区 | 日本最大色倩网站www | 久久久久免费观看 | 99视频热 | 色婷婷av一区二区 | a级黄色片视频 | 东京热tokyo综合久久精品 | 免费看av网| 国产91在线播放9色不卡 | 欧美性猛交一区二区三区精品 | 蜜桃精品视频在线观看 | 30一40一50女人毛片 | 抽插丰满内射高潮视频 | 日韩精品一区二区三区老鸭窝 | 亚洲午夜久久久 | 韩国精品久久久久久无码 | 久久中文精品无码中文字幕下载 | 神马影院午夜伦理片 | 成年人网站黄色 | 激情综合色五月丁香六月亚洲 | 91性高湖久久久久久久久_久久99 | 亚洲欧洲偷自拍图片区 | 国产综合精品在线 | 丰满人妻一区二区三区视频 | 四虎永久在线精品免费观看视频 | 国产自国产自愉自愉免费24区 | 国产精华7777777 | 国产男生午夜福利免费网站 | 国产黄色美女视频 | 99re热这里有精品首页 | 成年女人毛片免费视频 | 国产亚洲天堂网 | 成年女人wwxx免费国产 | 亚洲高清免费 | 国产日产欧产精品精品推荐免费 | 五月丁香色综合久久4438 | 麻豆免费观看视频 | 精品国产乱码久久久久久夜深人妻 | 91高清在线| 一本之道之高码清乱码加勒比 | 四虎国产精品永久在线国在线 | 各处沟厕大尺度偷拍女厕嘘嘘 | 国产精品久久久久久在线观看 | 国内a级毛片 | 毛片网站免费在线观看 | 正在播放国产乱子伦最新视频 | 欧美特黄aaa | 大白屁股一区二区视频 | 国户精品久久久久久久久久久不卡 | 999国产精品999久久久久久 | 无码爆乳护士让我爽 | 黄色大片免费观看视频 | 亚洲综合国产成人丁香五月激情 | 亚欧成人中文字幕一区 | 熟女无套高潮内谢吼叫免费 | 91香焦视频 | 2019最新中文字幕在线观看 | 国产一区二区三区av在线无码观看 | 婚后日日高h文孕 | 国产精品无码一区二区在线 | 久久久久国精品产熟女久色 | 欧美中文字幕在线 | 美国黄色av | 中文字幕乱码在线 | 欧美videossex另类 | 亚洲中国久久精品无码 | 欧美视频在线观看免费 | 在线三级av | 久久在线视频免费观看 | 日韩精品国产一区 | 男女偷爱性视频刺激 | 中国娇小与黑人巨大交 | 欧美裸体精品 | 在线看黄色av | 国产天码青椒老色批青椒影视 | 日韩少妇毛片 | 丰满人妻熟妇乱又伦精品app | 一本一道久久a久久综合蜜桃 | 小荡货奶真大水多好紧视频 | 少妇人妻精品无码专区视频 | 91高跟黑色丝袜呻吟动态图 | 亚洲成a人v电影在线观看 | 国产亚洲精品久久久闺蜜 | 粗大的内捧猛烈进出 | 国产成+人+综合+亚洲专区 | 97视频在线播放 | 韩国三级a视频在线观看 | 欧美女同网站 | 国产欧美在线观看不卡 | 四房播色综合久久婷婷 | 中文无码乱人伦中文视频在线v | 四虎亚洲精品成人a在线观看 | 美女黄网站18禁免费看 | 黄色小视频免费在线观看 | 国产精视频 | 国产成人亚洲欧洲在线 | 国产精品亚洲精品日韩已满 | 另类小说五月天 | 99久久免费看精品国产一区 | 人人干狠狠干 | 91快射| 村上凉子在线播放av88 | 亚洲自偷自偷在线制服 | 一级大黄色片 | 欧美揉bbbbb揉bbbbb| 国产精品成人精品久久久 | 欧美激情按摩 | 亚洲性网站 | 欧美激性欧美激情在线 | 亚洲欧洲自拍拍偷无码 | www.天堂av.com | 日韩福利视频在线观看 | 国产三级视频 | 欧美性色xxxx | 天天影视色香欲综合久久 | 日日夜夜婷婷 | 成人无码区在线观看 | juliaannxxxxx高清| 国产精品成av人在线视午夜片 | 玩弄放荡人妻少妇系列视频 | 9l视频自拍九色9l视频最新 | 无码毛片内射白浆视频 | 翘臀少妇被扒开屁股日出水爆乳 | 欧美成人伊人久久综合网 | 久久99精品久久久久久9蜜桃 | 91欧美日韩综合 | 日韩精品一区二区三区在线观看 | 久久精品国产精品国产一区 | 欧美最猛黑人xxxx黑人表情 | 日韩精品视频在线免费观看 | 亚洲中字幕 | av官网在线观看 | 成人免费高清在线播放 | 国产精品一二三级 | 九九av | 老牛精品亚洲成av人片 | 美女隐私黄www网站免费 | 欧美黑人xxxx高潮猛交 | 99久久精品国产毛片 | 亚洲高清网站 | 初高中福利视频网站 | 2021麻豆剧传媒一二三区 | 一本一本久久a久久综合精品蜜桃 | 亚洲成人精品av | 四虎影视无码永久免费 | 三上悠亚精品二区 | 国产麻豆剧果冻传媒兄妹蕉谈 | 亚洲欧美日韩精品永久 | 久久久久国产综合av天堂 | 国产成人99 | 91看片在线| 亚洲a在线播放 | 久久精品首页 | 天堂va欧美ⅴa亚洲va | 欧美性videos高清精品 | 喷水一区二区 | 素人在线观看免费视频 | 亚洲精品卡2卡3卡4卡5卡区 | 精品国产av色一区二区深夜久久 | 亚洲精品国产视频 | 91精品国产99久久久久久久 | 日韩精品一级 | 亚洲一区精品视频 | 中国6一12呦女精品 巨大乳の揉んで乳榨り奶水 | 91精品一二区 | 亚洲精品乱码8久久久久久日本 | 亚洲人成线无码7777 | xnxx国产精品hd| 一女两夫做爰3p高h文 | 国产午国产午夜精华 免费 91综合国产 | 午夜亚洲 | 欧美丰满熟妇多毛xxxxx | 日韩福利视频一区 | 国产卡1卡2卡3精品视频 | 中文字幕人妻中文av不卡专区 | 国产乱码精品一区三上 | 亚洲精品自在在线观看 | 中文字幕丝袜第1页 | 亚洲一二三区在线 | 91操操操| 91精品夜夜| 久久婷婷色五月综合图区 | 无码人妻久久一区二区三区app | 首页 亚洲 欧美 制服 丝腿 | 又大又粗又硬又爽黄毛少妇 | 亚洲成a人片在线观看日本 欧美激情第1页 | 国产高潮久久久 | 在线观看毛片视频 | 久久99日韩国产精品久久99 | 精品厕所偷拍各类美女tp嘘嘘 | 中文在线字幕观 | 久碰人妻人妻人妻人妻人掠 | 又黄又爽又刺激久久久久亚洲精品 | 国产亚洲精品久久久久久青梅 | av5566| caopeng视频 | 九色精品视频 | 黄视频在线 | 国产精品人八做人人女人a级刘 | 她也色在线观看 | 久久国产色| 无码少妇一区二区浪潮免费 | 摸进她的内裤里疯狂揉她动图视频 | 美女性生活视频 | www色黄 | 亚洲欧美va天堂人熟伦 | 少妇高潮喷潮久久久影院 | 欧美人禽杂交狂配 | 欧美变态另类刺激 | av丁香| 欧美美女一区二区 | 久久久亚洲国产美女国产盗摄 | 久草国产在线 | 欧美成人性生活免费视频 | 久久精品国内一区二区三区 | 嫩草影院在线视频 | 久草中文在线视频 | 亚洲精品一区二区三天美 | 天堂中文资源库官网 | 久久99热只有频精品6狠狠 | 日日爱视频 | 污动漫网站 | 亚洲开心网 | 92看片淫黄大片看国产片图片 | 欧美一区中文字幕 | 国产伦精品一区二区三区免费迷 | 免费人成激情视频在线观看 | 无码制服丝袜人妻在线视频精品 | www日韩在线观看 | 在线|国产精品女主播阳台 欧美视频一区二区在线观看 | 天堂va欧美ⅴa亚洲va一国产 | 国产特级av | 免费中文字幕日产乱码 | 国产九色在线 | 亚洲欧美色一区二区三区 | 黄色免费成人 | 18精品爽国产白嫩精品 | 2018自拍偷拍 | 熟妇人妻无乱码中文字幕真矢织江 | 99日韩精品 | 欧美成人精品欧美一 | 国内精品国产三级国产a久久 | 国产精品高潮呻吟久 | 成人片在线免费看 | 亚洲好看站| 亚洲欧美午夜 | 国产成人免费看 | 欧美两根一起进3p做受视频 | 久久国产v综合v亚洲欧美蜜臀 | 国产精品久久久久久在线观看 | 日本在线观看邪恶网站不卡 | 亚洲男人天堂2018av | 日韩不卡中文字幕 | 美女又爽又黄视频毛茸茸 | 中国女人内谢69xxxxⅹ视频 | 一级做a爱片久久毛片a高清 | 大学生疯狂高潮呻吟免费视频 | 国内精品九九久久精品 | 中文字幕一级 | 777国产偷窥盗摄精品品在线 | 人妻互换精品一区二区 | 伊人久久精品欧洲综合网 | 久久亚洲日韩精品一区二区三区 | 亚无码乱人伦一区二区 | 男人综合网| 国产精品毛片在线 | 2014亚洲天堂 | 国产亚洲精品欧洲在线视频 | 黄a在线观看 | 国产成年人视频网站 | 久久久久夜 | 小黄鸭精品aⅴ导航网站入口 | 欧美亚洲日韩国产人成在线播放 | 天天看黄色片 | 久久久久久亚洲精品无码 | 女男羞羞视频网站免费 | 伊人久久亚洲精品一区 | 91精品国产一区二区三区蜜臀 | 中文字幕精品在线 | 久久综合成人 | 国产精品久久综合免费 | 国产精品18久久久久久首页狼 | 蜜桃av免费看 | 亚洲一区二区三区尿失禁 | 欧美日韩高清 | 日韩精品无码一区二区忘忧草 | 久久久无码精品一区二区三区 | 男人天堂视频在线 | 色欲色欲久久综合网 | 欧美成aⅴ人在线视频 | 久久久久青草线蕉综合 | 亚洲人成网站18禁止一区 | 四虎国产精品成人永久免费影视 | 日韩精品久久久久 | 一本大道大臿蕉视频无码 | 6699嫩草久久久精品影院竹菊 | 综合无码一区二区三区 | 天堂中文在线最新 | 国产成人亚洲综合a∨猫咪 午夜xx | 973理论片235影院9 | av永久免费| av视屏在线 | 盗摄精品av一区二区三区 | 色悠久久久 | 欧美 日韩 国产 另类 图片区 | 风间由美在线观看 | 亚洲成av人网站在线播放 | 日本免费a视频 | 18禁黄网站禁片免费观看在线 | 亚洲国产福利成人一区二区 | 欧美日韩中文国产 | 三级成年网站在线观看级爱网 | 久草资源福利 | 欧美午夜三级 | 欧美乱大交xxxxx潮喷 | 无码h黄肉动漫在线观看999 | 啪啪免费 | 曰韩中文字幕 | 久久久久久精品成人鲁丝电影 | 日韩精品一卡2卡三卡4卡 | 国产 亚洲 制服 无码 中文 | 人人爽人人爽人人片av | 欧美人与动人物牲交免费观看久久 | 亚洲二区在线 | 国产日韩在线观看一区 | 99精品国产免费久久 | 偷拍盗摄高潮叫床对白清晰 | 久久成人18免费网站 | 看毛片视频 | 国产黄色片视频 | 黄色综合| 色先锋玖玖av资源部 | 欧美日韩精品 | 亚洲成人av一区二区 | 亚洲最新一卡二卡三卡 | 精品少妇人妻av无码专区 | 无码人妻精品一区二区三区久久久 | 天堂网www天堂资源网 | a级片网址| 超碰人人做 | 国产免费又粗又猛又爽 | 久久999精品久久久有什么优势 | 久久久无码一区二区三区 | xxxx18国产 | 国产精品无套内射迪丽热巴 | 在线看片免费人成视频久网 | 做爰高潮视频免费的看 | 婷婷久久综合九色综合 | 激情射精爆插热吻无码视频 | 亚洲国产精品无码第一区二区三区 | eeuss影院在线奇兵区145 | 久久精品99久久久久久 | 国产高清视频在线免费观看 | eeuss国产一区二区三区 | 99re在线视频精品 | 国产亚洲精品久久久久婷婷瑜伽 | 少妇人妻上班偷人精品视频 | 搡老女人一区二区三区视频tv | 99热免费在线 | 日韩在线视频免费播放 | a∨在线观看| 欧美mv日韩mv国产网站 | 中文字幕精品亚洲人成在线 | 天躁夜夜躁狼狠躁 | 色屋永久 | 东京热一本无码av | 国产自在现线2019 | 欧美日韩毛片 | 97毛片 | 国产侵犯亲女在线 | 黄色大片在线 | 北条麻妃青青久久 | 国产亚洲无日韩乱码 | 国产精品国产三级国产三级人妇 | 欧美一道本一区二区三区 | 亚a∨国av综av涩涩涩 | 精品91久久久久久 | 国产日韩欧美亚洲精品中字 | 亚洲欧洲日产国码无码动漫 | 亚洲熟妇av一区二区三区下载 | 午夜在线一区 | 91看片视频 | 久久蜜臀 | 中文字幕永久 | 国产免费午夜a无码v视频 | 国产亚洲日韩一区二区三区 | 狂野欧美性猛交bbbb | 欧美成人黑人xx视频免费观看 | 99视频| 国产 欧美 精品 | 国产精品99久久久久久武松影视 | 国产精品黄色av | 国产亚洲精品久久久久久国模美 | 日本熟妇色一本在线视频 | 狠狠色狠狠色综合久久蜜芽 | 天堂а√在线资源在线 | 色哥网| 国产女同疯狂作爱系列2 | 台湾一级视频 | 久本草在线中文字幕亚洲 | av不卡免费在线 | 一区二区三区www | 国产一区 在线播放 | 国产乱子伦60女人的皮视频 | 一区二区在线 | 国 亚洲国产初高中女 | av大片网址 | 五月天婷婷缴情五月免费观看 | 大陆偷拍av| 日韩三级精品 | 国产 欧美 日韩 一区 | √天堂资源在线中文8在线最新版 | 青青99 | 日产精品久久久一区二区 | 国产精品水嫩水嫩 | 在线 日本 制服 中文 欧美 | a在线免费| 蜜芽国产尤物av尤物在线看 | 久久综合久中文字幕青草 | 中文字幕色 | 91红桃视频 | 十八岁以下禁止观看黄下载链接 | 亚洲最大在线观看 | 免费人成视频网站在线下载 | 好大好深好猛好爽视频拍拍拍 | 国产三级在线观看完整版 | 国产一区二区三区四区三区四 | 欧美久久精品一级黑人c片 男人的又粗又长又硬 | 少妇 酒店 露脸 3p | 国产精品捆绑调教网站 | 成人亚洲网 | 日韩av免费播放 | 4438xx亚洲五月最大丁香 | 亚洲青草 | 人妻无码一区二区视频 | 国产精品一区二区三区四区在线观看 | 一区二区三区国产在线观看 | 一级视频毛片 | 精品国产一区二区三区不卡蜜臂 | 久久久久久无码日韩欧美 | 看国产毛片 | 亚洲处破女av日韩精品波波网 | 国色天香一卡2卡三卡4卡乱码 | av福利网址 | 人妻系列无码专区喂奶 | 护士奶头又白又大又好摸视频 | 狠狠热在线视频免费 | 优优人体大尺大尺无毒不卡 | 亚洲va综合va国产产va中 | 少妇无码一区二区二三区 | 蜜桃av鲁一鲁一鲁一鲁俄罗斯的 | 久久久久国产精品熟女影院 | 中国男女全黄大片 | 欧美激情二区三区 | 永久免费无码av网站在线观看 | 手机看片精品国产福利 | 中文字幕在线观看三区 | 岛国福利视频 | 日本黄动漫 | 极品粉嫩嫩模大尺度无码 | 久久人妻av中文字幕 | 麻豆国产原创视频在线播放 | 少妇裸交aa大片 | 成人午夜做爰视频免费看 | 中日韩精品视频 | 欧美尺寸又黑又粗又长 | 不卡无码av一区二区三区 | 久久无码人妻影院 | 男人综合网 | 成人做爰高潮片免费视频美国 | 欧洲人与动牲交α欧美精品 | 国产精品无码永久免费888 | 美女网站免费观看视频 | 少妇性i交大片免费 | 精品久久久久久无码中文字幕 | 国产精品乱码一区二区三区视频 | 亚洲最新偷拍 | 无码国产精成人午夜视频一区二区 | 国内自拍av| 精品 日韩 国产 欧美 视频 | 精品福利一区二区三区免费视频 | 国产乱妇4p交换乱免费视频 | 天天舔天天爱 | 亚洲精品在看在线观看高清 | 97一期涩涩97片久久久久久久 | 成人免费午夜无码视频在线播放 | 国产传媒一级片 | 九九99九九精彩3 | 国产一区福利 | 国产免费黄色片 | 中文字幕无码日韩欧免费软件 | 欧美乱论视频 | 欧美老人巨大xxxx做受视频 | 九九视频这里只有精品 | 亚洲欧美中文字幕日韩一区二区 | 136导航fldh福利视频微拍 | 日韩第一页在线 | 女人高潮av国产伦理剧 | av片子在线观看 | 国产精品亚洲精品日韩已满十八小 | 国产精品乱码一区二区视频 | 天天摸夜夜添狠狠添婷婷 | 91黄瓜视频 | 天堂视频中文在线 | 大地资源影视在线播放观看高清视频 | 疯狂添女人下部视频免费 | 国产69精品久久99卡顿的解决方法 | 91免费进入 | 亚色91| 国产台湾无码av片在线观看 | 伊人婷婷色香五月综合缴缴情 | 成人免费看黄网站yyy456 | 国偷自产一区二视频观看 | 精品人妻无码一区二区三区 | 国产综合视频一区二区三区 | 99久久99久久精品免费看蜜桃 | 亚洲国产极品 | 免费福利在线观看 | 国产精品久久久久久久久免费相片 | 亚洲精品视频免费观看 | 欧美乱做爰xxxⅹ久久久 | 好大好深好猛好爽视频拍拍拍 | 国产亚洲精久久久久久无码苍井空 | 日本a级在线 | 日本视频一区二区三区 | 一区二区免费 | 精品无码人妻av受辱日韩 | 印度女人狂野牲交 | 美女18禁一区二区三区视频 | 国产精品久久亚洲 | 天下第一社区视频www日本 | 欧美亚洲另类丝袜综合网 | 国产精品爆乳在线播放不卡 | 国产边摸边吃奶边叫做激情视频 | 嫩草嫩草嫩草嫩草嫩草 | 99精品视频国产 | 忘忧草日本社区在线播放 | 性按摩玩人妻hd中文字幕 | 久久不雅视频 | 天天摸夜夜添久久精品 | 亚洲日韩欧美在线无卡 | 国产欧美一区二区精品忘忧草 | 欧美孕妇姓交大片 | а√天堂资源中文在线官网九色 | 日韩午夜无码精品试看 | 欧洲亚洲国产精品 | 亚洲综合一区无码精品 | 美女又爽又黄视频毛茸茸 | av免费大片| 麻花传媒在线mv免费观看视频 | 国产网红主播精品av | 免费国产va在线观看视频 | 亚洲一区二区小说 | 黑人巨大xxxxx性猛交 | 91在线精品观看 | 伊人久久中文字幕 | 26uuu在线亚洲欧美 | 东方aⅴ免费观看久久av | 少妇三级全黄在线播放 | 9999免费视频 | 在线观看免费成人 | 丁香五月综合久久激情 | 成人免费视频在线观看地区免下载 | 午夜福利无码一区二区 | 日韩超碰人人爽人人做人人添 | 久久精品一区二区三区四区毛片 | 草草影院在线观看视频 | 亚洲精品一区二区三区麻豆 | 羞羞影院午夜男女爽爽影院网站 | 又大又硬又爽18禁免费看 | 亚洲在线看 | 国产无套护士在线观看 | 国产精品亚洲а∨无码播放麻豆 | 国产成人综合一区人人 | 天堂中文在线视频 | 超碰97av在线 | 国产精品亚洲精品久久精品 | 国产亚洲精品久久久久蜜臀 | 伊人免费在线观看 | 国产一区二区三区不卡在线看 | av天堂永久资源网亚洲高清 | 国产色爱| 精品国产乱码久久久久久红粉 | 成人精品免费在线观看 | 福利所第一导航福利 | 亚洲无卡视频 | 国产av一区二区三区传媒 | 少妇人妻真实偷人精品视频 | 日日躁夜夜躁aaaabbbb | 亚洲 欧洲 日韩 综合色天使 | 日韩成人免费观看 | av网址观看| 狠狠伊人| 亚洲大尺度专区 | 亚洲精品中字 | 午夜亚洲视频 | 丁香五月激情综合国产 | 亚洲国产精品久久精品成人网站 | 综合无码成人aⅴ视频在线观看 | 在线 | 麻豆国产传媒61国产免费 | 91美女片黄| 国产精品99久久久久久夜夜嗨 | 无码免费毛片手机在线无卡顿 | 性高朝久久久久久久3小时 91网站在线免费观看 | 日本黄色大片免费看 | 日韩在线一二三区 | 人人爽人人草 | 成人三级在线视频 | 综合亚洲另类欧美久久成人精品 | 中文字幕乱码亚洲影视 | 久草在线免费资源 | 中文av无码人妻一区二区三区 | 国产又粗又硬又大爽黄老大爷视 | 欧美人与禽2o2o性论交 | 免费无码成人片 | 伊人久久五月 | 成人av一区二区免费播放 | 五十老熟妇乱子伦免费观看 | 91一区二区三区 | 午夜av免费在线观看 | 成人tv888| 沈阳45老熟女高潮喷水亮点 | 久久久麻豆精品一区二区 | 把女邻居弄到潮喷的性经历 | 日韩无码专区 | 日韩在线中文字幕 | 国产精品99久久久精品 | 四虎4hu永久免费 | 色屁屁www影院入口免费 | 一中文字幕日产乱码va | 国产成人福利在线视频播放下载 | 人妻精品动漫h无码网站 | 侵犯の奶水授乳羞羞游戏 | 久久精品人人做人人爽 | 国产日韩欧美亚欧在线观看 | 日本在线观看中文字幕 | 久久精品欧美一区二区 | 欧美第一页草草影院 | 可以直接看的毛片 | 337p粉嫩日本欧洲亚福利 | 国产视频亚洲 | 黄色成人在线免费观看 | 亚洲午夜未满十八勿入网站2 | 少妇一级二级三级 | 射精情感曰妓女色视频 | 粗大的内捧猛烈进出小视频 | 最爽free性欧美人妖 | 国产精品久久久久一区二区 | 91视频xxx | 中文字幕免费播放 | 欧美视频a | 夜夜夜操| 午夜亚洲精品久久一区二区 | 高跟肉丝丝袜呻吟啪啪网站av | 国内精品国产三级国产aⅴ久 | 麻豆成人传媒一区二区 | 色老板精品视频在线观看 | 午夜精品久久久久久久99樱花 | 国产精品国产三级国产专区51区 | 精品一区二区三区无码免费视频 | 日本啪啪网站 | 国产片精品av在线观看夜色 | 欧美激情一区二区三区高清视频 | 天天做天天爱 | 色偷偷88888欧美精品久久久 | 国产日韩不卡 | 欧美日韩一区在线 | 亚州久久久久区1区2少妇 | 亚洲色一色噜一噜噜噜 | 香港三日三级少妇三级66 | 性人久久网av | 亚洲精品久久久久久动漫器材一区 | 全国最大的成人网 | 日日橹狠狠爱欧美二区免费 | 老司机午夜免费福利 | 无码精品a∨动漫在线观看 97久久精品人人做人人爽50路 | 国产裸体无遮挡免费视频 | 五月婷婷久久草丁香 | 草草影视在线观看 | 国产毛片久久久久久美女视频 | 国产清纯粉嫩学生白丝在线观看 | 越南毛茸茸的少妇 | 精品av无码国产一区二区 | 久久99热只有频精品6狠狠 | 小宝贝荡货啊用力水湿aⅴ视频 | 久久亚洲少妇 | 精品含羞草免费视频观看 | 后入内射无码人妻一区 | 精品欧美一区二区三区 | 91精品国产高清一区二区三区蜜臀 | 伊人365| 高清欧美性猛交xxxx黑人猛交 | 狼人综合av | 国产精品久久精品第一页 | 欧美成人一区二免费视频软件 | 亚洲精品国偷自产在线99正片 | 亚洲国产精品一区二区美利坚 | 蜜臀亚洲精品国产aⅴ综合第一 | 91麻豆精品国产理伦片在线观看 | 国产女人18毛片水真多1kt∧ | 久久大奶 | 69大片视频免费观看视频 | 丰满人妻熟妇乱又伦精品劲 | 亚洲另类激情综合偷自拍图片 | 裸身美女无遮挡永久免费视频 | 天天弄天天模 | 欧美人妻aⅴ中文字幕 | 精品国产迷系列在线观看 | 国产亚洲精品久久久久天堂软件 | 国产成人理论无码电影网 | 中文精品无码中文字幕无码专区 | 国产xxxx裸体xxx免费 | 偷拍老头老太作爱 | 少妇一边呻吟一边说使劲 | 国产区又黄又硬高潮的视频 | 18禁成年无码免费网站无遮挡 | k频道国产在线观看 | 日本a级片视频 | 国产亚洲精品无码专区 | 欧美黑人又大又粗xxxxx | 欧洲亚洲1卡二卡三卡2021 | 免费精品一区二区三区第35 | 日韩精品一区二区三区色欲av | 污污内射久久一区二区欧美日韩 | 国产精品一区二区在线观看99 | 女仆乖h调教跪趴1v1 | 尹人香蕉久久99天天拍欧美p7 | 国产一区 在线播放 | 日韩精品久久久久久久的张开腿让 | 97成人精品国语自产拍 | 日韩1区3区4区第一页 | 久久久久日韩精品免费观看 | 一级久久久久久 | 激情欧美成人小说在线视频 | 国产操女人 | 韩国无码av片在线观看 | 嘴交的视频丨vk口舌视频 | 伊人久久亚洲综合影院首页 | 欧美色图一区 | 日韩欧美久久精品 | 三级成人网| a毛片终身免费观看网站 | 国产又黄又刺激又高潮的网站 | 日本高清在线一区二区三区 | 国产激情毛片 | 无码人妻h动漫中文字幕 | 大陆明星乱淫(高h)小说 | 亚洲精品午夜国产va久久成人 | 国内精品一区二区 | 香蕉人人超人人超碰超国产 | 少妇av射精精品蜜桃专区 | 国产欧美69久久久久久9龙 | 字幕网在线观看 | 国产无遮挡无码视频在线观看 | 日韩在线观看av | 国产亚洲人成网站观看 | 国产成人精品无码片区 | 欧美日韩一区二区三区在线播放 | 亚洲欧美激情精品一区二区 | 国产亚洲综合在线 | 乱女午夜精品一区二区三区 | 777色视频| 亚洲国产成人久久综合下载 | 亚洲区一区 | 国产一区二区三区成人久久片老牛 | fc2成人免费人成在线观看播放 | 亚洲日韩中文字幕久热 | 亚洲精品毛片一级91精品 | 天天爽天天狠久久久综合麻豆 | 久久久久极品 | 九九精品国产 | 成人精品一区二区三区 | 久久青青视频 | 91一二区 | 亚洲中文字幕乱码熟女在线 | 久久欧美一区二区三区性生奴 | 性欧美巨大乳 | 高清不卡视频 | 欧美xxxx日本和非洲 | 欧美亚洲日本国产黑白配 | 99在线影院 | 国产中文字幕乱人伦在线观看 | 农村偷拍xxxxx | 中文字幕+乱码+中文字幕明步 | 日本乱论视频 | 亚洲毛片不卡av在线播放一区 | 免费大香伊蕉在人线国产 | 国产成人精品免费 | 香蕉欧美成人精品a∨在线观看 | 欧美亚洲一级 | 国产又色又爽又黄刺激在线视频 | 欧洲精品在线播放 | 波多野结衣久久久久 | 黄色av免费在线看 | h部分肌肉警猛淫文 | 在线观看一区二区三区av | 国产成人无码一区二区在线播放 | 日韩久久网| 中文有码视频在线播放免费 | 精品一区heyzo在线播放 | 成人精品一区二区三区电影免费 | 精品久久久久久久国产潘金莲 | 熟妇的奶头又大又长奶水视频 | 97精品人妻一区二区三区香蕉 | 99蜜桃臀精品视频在线观看 | 国产精品3区 | 99久热国产精品视频尤物 | 亚洲精品成人无码中文毛片不卡 | 国产欧美亚洲精品第二区软件 | 亚洲天堂免费视频 | 快色av | 国产波多野结衣 | 少妇亲子伦av | 人妻免费一区二区三区最新 | 日本中文字幕网 | 97人洗澡从澡人人爽人人模 | 香港三级韩国三级日本三级 | 亚洲人成伊人成综合网小说 | 国产精品精品国产 | 国产成人精品午夜福利 | 久久zyz资源站无码中文动漫 | 国产精品久久久久久久久久尿 | 欧美黄色一区 | 日本高清www免费视频大豆 | 欧美午夜大片 | av污| 国产无套流白浆视频免费 | 亚洲一卡二卡三卡四卡 | 国产精品嫩草影院入口一二三 | 久久久精品中文字幕麻豆发布 | 日本高清裸体私密写真集 | 欧洲av在线播放 | 日本草草视频 | 亚洲人ⅴsaⅴ国产精品 | 99精品视频免费热播在线观看 | 狠狠爱亚洲五月婷婷av | 国产特级全黄寡妇毛片 | 涩涩成人网 | aⅴ精品无码无卡在线观看 色喜国模李晴超大尺度 | 中文字幕av免费在线观看 | 欧美z0zo人禽交欧美人禽交 | 中文在线字幕免费观 | 亚洲精品一区二区三 | 无码毛片一区二区三区本码视频 | 999久久久久 | 国产乱人伦中文无无码视频试看 | 欧美人成在线 | 精彩视频一区二区三区 | 夜夜撸影院 | 成人a站 | 一区二区三区无码不卡无在线 | 国产裸体xxxx视频在线播放 | 日韩免费一区 | 日日碰狠狠躁久久躁综合小说 | 久久精品国产亚洲a∨蜜臀 欧美成人h亚洲综合在线观看 | 亚洲欧美网站 | 欧洲色视频| 三个熟睡少妇的按摩中文字幕 | 国产黄色毛片视频 | 99er在线观看 | 亚洲毛片视频 | 在线手机av| 私色综合网 | 成人开心网| 欧美成人一区二免费视频小说 | 五月丁香色综合久久4438 | 亚洲精品乱码久久久久66国产成 | 美女视频黄频a美女大全 | 69精品丰满人妻无码视频a片 | 久久久久麻豆v国产精华液好用吗 | av永久免费观看网站 | 亚洲人成影院在线观看 | 婷婷丁香六月激情综合啪 | 美女视频一二三区 | 91视频社区 | 牛牛热在线视频 | 香蕉成人臿臿在线观看 | 麻豆画精品传媒2021一二三区 | 久久大胆 | 精品日韩一区二区 | 日本狠狠爱 | 国产精品特黄aaaa片在线观看 | 久久国产精品99久久久久久丝袜 | 那个网站可以看毛片 | 黄色a级片网站 | 自偷自拍亚洲综合精品麻豆 | 国产91精品欧美 | 欧美激情性生活 | 老熟妇午夜毛片一区二区三区 | 精品国产乱码久久久久久口爆网站 | 久久综合亚洲色hezyo社区 | 2018国产大陆天天弄 | 亚洲第一aaaaa片 | 女生毛片 | 天天爽影院一区二区在线影院 | 黄色.com | 国产成人精品免费视频大 | 网友自拍露脸国语对白 | 首页 亚洲 欧美 制服 丝腿 | 天天操bb| 成人av网址大全 | √最新版天堂资源网在线 | 国产午夜影视大全免费观看 | 国产成人无码av片在线观看不卡 | 日韩黄色在线观看 | 国模冰莲极品自慰人体 | 中文无码av在线亚洲电影 | 日本毛片在线 | 成人免费观看cn | 噜噜久久噜噜久久鬼88 | av无码不卡一区二区三区 | 女人被狂躁c到高潮喷水一区二区 | 天堂在线网 | 中文字幕在线视频精品 | 亚洲精品一区二区玖玖爱 | 黑人巨茎大战俄罗斯美女 | 国产成a人亚洲精v品无码性色 | 2020自拍偷拍 | 肉丝美脚视频一区二区 | 波多野结衣一二三四区 | av福利片| 老司机精品视频一区二区三区 | 欧美 亚洲 国产 制服 中文 | 久久久久国色αv免费观看 91色国产 | 国自产拍偷拍精品 | 18禁成年免费无码国产 | 日本人与禽zozzo小小的几孑 | 国产日产精品久久快鸭的功能介绍 | 欧美交换配乱吟粗大 | 97国产大学生情侣白嫩酒店 | 毛片大全免费看 | 国产精品涩涩涩视频网站 | 国产白浆在线 | 亚洲欧美不卡高清在线 | 成人婷婷网色偷偷亚洲男人的天堂 | 少妇性bbb搡bbb爽爽爽 | 黄色视屏在线免费观看 | 狠狠躁夜夜躁青青草原软件 | 狠狠色丁香久久婷婷综合图片 | 一级大毛片 | 少妇熟女天堂网av | 无码国产精品一区二区免费式影视 | 91成熟丰满女人少妇 | 国产真实一区二区三区 | 色一五月 | 久久天天躁夜夜躁狠狠综合 | 欧美激欧美啪啪片sm | 图片区小说区视频区综合 | 杨贵妃情欲艳谭三级 | 日本大胆人体视频 | 久久久久久久久久久久 | 免费在线一区二区 | 精品国产一区二区三 | 91popny丨九色丨国产 | 久久综合久久香蕉网欧美 | 亚洲最大无码中文字幕网站 | 91禁蘑菇在线看 | 性a视频 | 精品国产18久久久久久二百 | 极品销魂美女特嫩bbb片 | 国产在线观看黄色 | 韩国一区二区三区视频 | 日本人配人免费视频人 | 亚洲成av人最新无码 | a在线视频v视频 | 亚洲综合国产精品第一页 | 国产精品女优 | 久久免费看少妇a高潮一片黄特 | 欧美亚洲第一区 | 国产精品婷婷久久久久久 | 香港三级日本三级妇三级 | 久久亚洲天堂网 | 日韩一区二区视频 | 成人热舞视频一区 | 国产精品久久久久久爽爽爽 | 无码中文字幕人妻在线一区二区三区 | 日韩视频在线免费 | 国产v亚洲v天堂无码 | 久久久精品午夜免费不卡 | 国产精品视频色拍在线视频 | 国产三级一区二区三区 | 香蕉久久一区二区三区啪啪 | 小视频在线看 | 国产黄色大片在线观看 | 精品乱码无人区一区二区 | 亚洲女同精品一区二区 | 九九色视频 | 久久久久蜜桃精品成人片公司 | 日韩三区在线观看 | 日韩精品视频三区 | 国产乱人偷精品人妻a片 | 亚洲h视频在线观看 | 国产情侣疯狂作爱系列 | 日产精品久久久久久久 | 国语对白乱妇激情视频 | 亚洲最大色大成人av | 亚洲欧美人成网站在线观看看 | 亚洲乱码卡一卡二卡新区仙踪木木 | 国产在不卡免费一区二区三 | 国产九九九九九九九a片 | 国产亚洲情侣一区二区无 | www.av网 | 成人国产精品秘片多多 | 国产精品久久久久久人妻 | av免费一区 | 巨胸喷奶水www久久久免费动漫 | 日本二区三区欧美亚洲国 | 狠狠色欧美亚洲狠狠色www | 伊伊人成亚洲综合人网香 | 久久亚洲精品无码av宋 | 婷婷丁香五月六月综合激情啪 | 黑人强伦姧人妻日韩那庞大的 | 亚洲男人天堂 | 美女一级片| 99热在线免费观看 | 丰满妇女强制高潮18xxxx | www.com毛片| 挺进邻居丰满少妇的身体 | 日韩av高潮喷水在线观看 | 亚洲一区二区三区四区五区乱码 | 老司机激情影院 | 欧美一区2区三区4区公司 | а√天堂资源中文在线官网 | 欧美久久一区 | 国产精品毛多多水多 | 第一福利精品500在线导航 | av成人 | 日韩无砖专区2021嘟嘟网 | 又硬又水多又坚少妇18p | 精品欧洲av无码一区二区男男 | 中日韩无砖码一线二线 | 亚洲经典一区二区三区 | 国产午夜福利在线播放爱剪辑 | a级黄色片免费 | 国产精品视频分类 | 中文字幕日韩精品一区 | 中文字幕免费在线看 | 日韩精品人妻无码久久影院 | 99这里只有精品 | 奇米影视777四色狠狠 | 国产一区亚洲 | 欧美成人性色 | 久久久久久久.comav | 日韩视频在线免费播放 | 伊人狠狠色j香婷婷综合 | 亚洲国产精品久久一线app | 欧美福利在线观看 | 国产精品人人人人 | 日本国产成人国产在线播放 | 成人午夜大片免费看爽爽爽 | 国产精品av久久久久久久久久 | 天天摸天天操天天爽 | 色哟哟免费在线观看 | 国产微拍精品一区二区 | 欧美三级韩国三级日本三斤在线观看 | 国产成人61精品免费看片 | 国产资源在线免费观看 | 中文无码人妻有码人妻中文字幕 | 亚洲高清www色好看美女 | 国产日韩在线观看不卡顿 | 8888四色奇米在线观看 | 中文字幕人妻无码一夲道 | jizz欧洲 | 免费无遮挡无码h肉动漫在线观看 | 欧美国产成人精品 | 亚洲爆乳精品无码一区二区三区 | 久中文字幕 | 你懂的欧美 | 最近中文字幕免费大全在线 | 黄色日批视频 | 九九久久精品视频 | 亚洲一区二区三区av天堂 | 女人被狂躁c到高潮视频 | 女同互舔互慰dv毛片 | 国产91 精品高潮白浆喷水 | 无码午夜福利免费区久久 | 69色| 9l视频自拍九色9l视频成人 | 麻豆文化传媒精品一区二区 | 亚洲欧美丝袜精品久久中文字幕 | 男生美女隐私黄www 色就是欧美 | 亚洲色无码播放 | 波多野结衣一区二区三区av高清 | 性一交一无一伦一精一品 | 国产原创av中文在线观看 | 国产 日韩 欧美 在线 | 欧美视频不卡 | 伊人久久大香线蕉综合中文字幕 | 日韩久久久久久久久久 | 中文字幕在线不卡 | 另类专区成人 | 久久久看| 欧美精品videosexo极品 | 男女性爽大片视频免费看 | 中国少妇内射xxxxx-百度 | 亚洲欧洲国产精品香蕉网 | 粉嫩一区 | 国产成人啪精品视频免费视频 | 精品少妇3p| 国产日本欧美在线 | 国产资源无限好片 | 亚洲影院丰满少妇中文字幕无码 | 2020久热爱精品视频在线观看 | 日本黄网站色大片免费观看 | 人妻少妇精品无码专区漫画 | 亚洲国产精品嫩草影院永久 | 久久精品亚洲男人的天堂 | 久久久亚洲裙底偷窥综合 | 经典三级伦理另类基地 | 高清免费av | 久久久久人妻一区二区三区 | 一区二区欧美视频 | 成人黄色av | 国产精品乱码久久久久软件 | 欧美成人乱码一二三四区免费 | 黑人大长吊大战中国人妻 | 男女啪啪免费观看的网址 | 狠狠撸在线视频 | 国产56页 | 小草国产精品情侣 | 国产亚洲成年网址在线观看 | 亚洲另类色区欧美日韩图片 | 足疗店女技师按摩毛片 | 日本黄漫动漫在线观看视频 | 国产无套白浆一区二区 | 一二三四视频社区3在线高清 | 亚洲最新在线视频 | 一级做a视频 | 美女张开腿给男人桶爽久久 | 成人影片在线播放 | 少妇性l交大片久久免费 | 亚洲国产第一站精品蜜芽 | 亚洲中文字幕一区精品自拍 | 51久久精品| 一卡二卡3卡4卡视频免费播放 | 欧美做受三级级视频播放 | 亚洲人成小说 | 久久这里只有精品国产免费10 | 国产真实野战在线视频 | 91欧美大片| 成年人免费网站在线观看 | 女人喷潮视频免费观看 | 动漫精品无码h在线观看 | 香蕉在线依人视频 | 嫩草国产福利视频一区二区 | 在线看片免费不卡人成视频 | 蜜臀少妇人妻在线 | hd日本xxxx| 成人性生交大片免费看r视频 | 日本高清在线观看视频 | 国产免费午夜福利片在线 | 天天操天天舔天天干 | 天堂网www在线 | 在线观看视频一区二区三区 | 亚洲精品视频在线免费播放 | 日韩免费视频一区 | 国产精品原创巨作av女教师 | 国v精品久久久网 | 亚洲欧洲成人a∨在线 | 7m视频成人精品分类 | 国产日韩视频 | 日本黄网站色大片免费观看 | 风间由美在线观看 | 韩国色综合| 欧美激情区 | 性欧美俄罗斯乱妇 | 久久久久久久黄色 | 亚洲精品嫩草研究院久久 | 成人婷婷网色偷偷亚洲男人的天堂 | 国产精品制服诱惑 | 极品美女白嫩呻吟湿淋淋照片 | 免费av网站在线观看 | 久久久啊啊啊 | 狼友网精品视频在线观看 | 一个人在线免费观看www视频 | 精品久久久久久久久久久久久久久久 | 久久性精品 | 婷婷伊人五月天 | 成人伊人青草久久综合网 | 色爱成人综合 | 欧美巨大双龙性猛交乱大 | 91精品国产99久久久久久久 | 久久中文字幕在线观看 | 亚洲一区二区三区视频在线 | 欧美理伦片在线播放 | www.激情网.com | 在线观看国产黄色 | 自拍视频亚洲综合在线精品 | 一级毛片aa | 一区二区三区内射美女毛片 | www爱色av| 美女裸免费观看网站 | 成人观看视频 | 欧美视频亚洲图片 | 国产美女视频免费观看的网站 | 欧美怡春院 | 亚洲国产av无码精品 | 78国产伦精品一区二区三区 | 国产人妻人伦精品1国产盗摄 | 粗大猛烈进出高潮视频 | 青青青国产在线视频在线观看 | 围产精品久久久久久久 | 亚洲午夜无码久久久久小说 | 在线日本中文字幕 | 窝窝午夜理论片影院 | www色日本| sese久久| 日韩精品极品视频在线观看免费 | 精品无码专区毛片 | 嫩草影院菊竹影院 | 午夜毛片不卡高清免费看 | 国产精品后入内射日本在线观看 | 亚欧av无码乱码在线观看性色 | 亚洲人精品亚洲人成在线 | 国产精品美女久久久久av福利 | 亚洲熟妇av一区二区三区 | 国产成人尤物在线视频 | 无码国模国产在线观看 | 免费啪 | juliaann精品艳妇hd | 精品21国产成人综合网在线 | 成人爽a毛片在线视频 | 青草青草久热精品视频在线播放 | 国产精品亚洲欧美中字 | 一区国产在线 | 日韩视频免费看 | 蜜桃色一区二区三区 | 日韩精品色哟哟 | 久久98 | 人妻系列无码一区二区三区 | 国产精品网红尤物福利在线观看 | 美女的胸给男人玩视频 | 日韩av片免费播放 | 对白刺激国语子与伦 | 激情黄色小视频 | 人妻无码不卡中文字幕系列 | 青青草成人免费在线视频 | 91精品国产亚洲 | 日日碰日日操 | 500av导航大全精品 | 四十五十老熟妇乱孑视频 | 亚洲中文无码精品卡通 | 欧美牲交a欧美牲交aⅴ | 成人一级片网站 | 91风间由美一区二区三区四区 | 中文字幕无码乱码人妻系列蜜桃 | 日韩欧美在线综合网 | 在线观看国产亚洲 | 久久爱资源网 | 中文字幕h| 少妇被粗大的猛烈进出免费视频 | 国模大尺度一区二区三区 | 亚洲精品中文在线 | 久久人人97超碰人人澡 | 韩国性猛交╳xxx乱大交 | 依依成人精品视频在线观看 | 涩爱av蜜臀夜夜嗨av | caoporn国产免费人人 | 黄色三级在线视频 | 精品国产一区二区三区国产区 | 18禁无遮挡肉动漫在线播放观看 | 91理论片 | 精品在线视频播放 | 337p日本大胆欧美人视频 | 亚洲色大成网站www永久一区 | 色八区人妻在线视频免费 | 欧洲极品无码一区二区三区 | 久久久久久久国产视频 | 成–人–黄–色–网–站 | 色先锋影音岛国av资源 | 深夜福利啪啪片 | 亚洲av禁18成人毛片一级在线 | 乱人伦人妻精品一区二区 | 日本高清色倩视频在线观看 | 国产精品人成电影在线观看 | 免费成人视屏 | 91免费国产精品 | 亚洲中文字幕精品一区二区三区 | 欧美老熟妇又粗又大 | 一本色道久久东京热 | 亚洲天堂二区 | 国产福利在线观看免费第一福利 | 木下凛凛子中文字幕亚洲 | 天堂av手机在线 | 亚洲欧美日韩成人一区在线 | 丰满少妇毛茸茸做性极端 | 国产又大又粗又爽的毛片 | 91视频三区| 女同互舔互慰dv毛片 | 久草视频精品 | 国产黄网永久免费视频大全 | 国产真实生活伦对白 | 日韩三级黄色 | 亚洲码国产精品高潮在线 | 亚洲男人的天堂一区二区 | 欧美在线视频网 | 欧美精品毛片久久久久久久 | 久久久久久久久女人体 | 亚洲午夜高清国产拍 | 亚洲综合激情七月婷婷 | 中文字幕视频一区 | 青青免费视频在线观看 | 在线免费观看av网址 | 色欲色香天天天综合网www | 亚洲黄色免费观看 | 女人两腿打开让男人添野外视频 | 久久免费看少妇高潮v片特黄 | 成人男女网24免费 | 99久久九九社区精品 | 久久久久久久.comav | 欧美jizz18 | 欧美日本一区二区 | 日本一上一下爱爱免费 | 国产国产乱老熟女视频网站97 | 性欧美长视频免费观看不卡 | 女同舌吻互慰一区二区 | 日韩亚洲欧美一区 | 一区二区国产精品 | 成年视频在线观看 | 欧美日韩在线亚洲综合国产人 | 人成乱码一区二区三区 | av有码在线观看 | 亚洲一区在线看 | 337p日本大胆欧久久 | 欧美色视 | 99国产欧美另类久久片 | 日本亚洲在线 | 国产精品视频一区二区免费不卡 | 久久香蕉国产线看观看猫咪av | 黄色在线观看免费 | 四虎影视在线观看2413 | 中文字幕无码免费久久 | 精品粉嫩超白一线天av | av十大腿控| 国产福利日本一区二区三区 | 中文日产乱幕九区无线码 | 精品国产乱码久久久久久芒果 | 久久久久国产综合av天堂 | 日韩av影院在线观看 | 91调教视频 | 无码熟妇αⅴ人妻又粗又大 | 国产内射大片99 | 天堂8中文在线最新版在线 国产日韩欧美91 | 欧美日韩中文国产一区 | 久久精品国产网红主播 | 欧亚乱熟女一区二区三区在线 | 成人91免费版| 亚洲一区二区在线免费观看 | 真实国产乱子伦对白视频不卡 | 亚洲国产精品无码久久久蜜芽 | 99综合在线 | av网站在线免费看 | 99热成人精品热久久 | 少妇被粗大的猛烈进出免费视频 | 国产系列精品av | 丰满岳乱妇在线观看中字 | 国产人妻一区二区三区久 | 亚洲精品国产一区二区 | 毛片黄色视频 | 美日欧激情av大片免费观看 | 亚洲精品视频三区 | 免费看片啪啪tv | 国产精品天干天干有线观看 | 性大片免费视频观看 | 九九精品网 | 欧美xxxx做受欧美88 | 满春阁精品a∨在线观看 | 免费国产人成18在线观看 | 国产精品免费一区 | 天天射天天干天天舔 | 国产欧美日韩成人 | 国产91丝袜在线观看 | 国产精品欧美成人片 | 香港黄色网 | 成人午夜免费网站 | 免费观看的av在线播放 | 狠狠干天天操 | 91一级视频 | 国产成人理论在线观看视频 | 欧美亚洲日本在线 | 国产无人区码熟妇毛片多 | 国产波多野结衣 | a级高清免费毛片 | 18成人在线 | 一本色道久久综合亚州精品蜜桃 | 性欧美丰满xxxx性 | 国产女人与zoxxxx另类 | 国产成人精品免高潮在线观看 | 色成人免费网站 | 2020亚洲男人天堂 | 亚洲www| 可以直接看的毛片 | 六月丁香久久 | 欧美日韩在大午夜爽爽影院 | 男女视频一区二区三区 | 久久婷婷国产综合国色天香 | 少妇系列av | 亚洲色图150p | 伊人艹| jiuse九色 | 一本之道高清无码视频 | 91精品少妇偷拍99 | 色版视频| 波多野结衣亚洲视频 | 免费看午夜福利在线观看 | 香港三日三级少妇三级99 | 国产乱子伦视频在线观看 | 亚洲男人成人性天堂网站 | 亚洲国产一区二区精品无码 | 国产aⅴ爽av久久久久成人 | 波多野结衣潮喷视频无码42 | 免费无码无遮挡裸体视频 | 午夜激情久久 | 国产成人综合亚洲欧美日韩 | 性欧美zoo| 国产情侣一区二区 | av色国产色拍 | 精品中文字幕一区二区三区av | 免费无码观看的av在线播放 | 日本无乱码高清在线观看 | 巨茎爆乳无码性色福利 | 激情偷拍 | 国产一级大片 | 久人人爽人人爽人人片av | 亚洲美女性视频 | 欧美国产综合视频 | 51视频国产精品一区二区 | 久久久777 | 日本饥渴人妻欲求不满 | 一本久道久久综合狠狠老 | 亚洲第一天堂久久 | 操小妹影院 | 欧美成人在线网站 | caoporn国产精品免费公开 | 午夜福利精品导航凹凸 | 无码精品人妻一区二区三区98 | 国内免费自拍视频 | 国产极品粉嫩在线观看的软件 | 亚洲国产精品无码专区在线观看 | 深夜福利影院 | av片在线免费观看 | 国产精品白丝喷浆 | 在线播放亚洲第一字幕 | 日韩一区不卡 | 99爱免费视频 | 岛国av在线免费观看 | 和嫩模做爰在线播放 | 在线天堂www中文 | 国产在线视频一区二区董小宛性色 | av无码免费岛国动作片 | 精品动漫3d一区二区三区免费版 | 国产精品美女久久久久久 | 夜夜夜躁高潮天天爽 | 森泽佳奈作品在线观看 | 97干在线视频 | 免费视频毛片 | 台湾佬成人中娱网222vvvv | 亚洲熟妇大图综合色区 | 粉嫩avcom | 成人免费视频免费观看 | 中日韩精品视频在线观看 | 国产精品久久久久久久久久久久久久久久久 | 国产视频在线一区二区 | 国产免费啪嗒啪嗒视频看看 | 女人18毛片水最多 | 狠狠色丁香九九婷婷综合五月 | 人妖另类巨茎双性人欧美视频 | 国产男女猛烈无遮挡 | 日韩少妇视频 | 一区二区三区在线 | 中国 | 暖暖视频 免费 日本社区 | av永久免费观看网站 | 一级黄色片在线看 | 韩国不卡av | 丝袜高跟麻麻浓精受孕人妻 | 国产麻豆一区二区三区 | 91成人网在线播放 | 日韩精品第三页 | 国模无码一区二区三区 | 国产免费网站在线观看 | 新版资源天堂中文 | 国产传媒一区二区 | 免费精品国偷自产在线2020 | 好吊色国产欧美日韩免费观看 | 韩国三级hd中文字幕 | 日本高清免费观看 | 亚洲欧美日本另类 | 国产麻豆精品一区二区三区v视界 | 国产精品不卡在线 | 深夜福利网 | 天堂mv在线mv免费mv香蕉 | 日本少妇浓毛bbwbbw | 国产在线观看高清视频黄网 | 国产激情无码视频在线播放 | 亚洲视频图片 | 免费一级做a爰片性色毛片 国产ts人妖系列张思妮在线观看 | 久久亚洲精精品中文字幕早川悠里 | 久久国内精品一区二区三区 | 国产无遮挡又黄又爽不要vip软件 | 欧美国产日产一区二区 | 淫欲av| 小12萝8禁在线喷水观看 | 久久99精品国产99久久6不卡 | av一区+二区在线播放 | 黄一区二区三区 | 国产成av人片久青草影院 | 国产真实伦视频 | jizz日韩| 国产成人精品无码片区在线观看 | 国产美女av| 亚洲一区av无码专区在线观看 | 性做久久久久久免费观看欧美 | 国产成a人亚洲精品 | 成年美女黄网站色大片免费看 | 国产在线精品一区二区在线观看 | 亚洲色大成网站www 亚洲人成手机电影网站 | 一级特黄特色的免费大片视频 | 久久久黄色一级片 | 天天视频亚洲 | 天天精品在线 | 国产精品久久久久久av福利软件 | 久久免费视频一区二区 | 国产一级黄色录像 | 亚洲综合人成网免费视频 | 三级av网站| 久久综合中文字幕 | 吃奶摸下激烈视频学生软件 | 激情黄色小说网站 | 亚洲日韩av片在线观看 | 一级a性色生活片毛片 | 国产一区二区三区视频网站 | 国产乱码一区二区三区免费 | 日日干日日操 | 两性午夜刺激性视频 | 午夜国产一区二区三区四区 | 久久精品中文字幕无码绿巨人 | 国产精品系列在线观看 | 亚洲一卡一卡二新区乱码无人区二 | 日本一道一区二区视频 | 久久久精品日本一区二区三区 | 亚洲清纯国产 | 97综合网 | 人妻另类 专区 欧美 制服 | 欧美精品乱码视频一二专区 | 一区二区三区国产精 | 欧美日韩人妻精品一区二区在线 | av中出在线 | 无码中文av波多野吉衣迅雷下载 | 九九热国产在线 | 久久天天躁夜夜躁狠狠i女人 | 亚洲国产精品无码久久久高潮 | 人妻综合专区第一页 | 久久久亚洲精华液精华液精华液 | 九热精品| 无码ol丝袜高跟秘书在线观看 | 亚洲性综合 | 国产午夜激情视频 | 无码av中文一二三区 | 男女边吃奶边摸边做边爱视频 | 天天躁夜夜躁狠狠躁2020 | 亚洲色www成人永久网址 | 久久91精品国产91久久跳 | 国产亚洲制服免视频 | 人妻少妇伦在线无码专区视频 | 欧美日韩不卡一区二区 | 国产精品国一国二在线 | 猫咪免费人成网站在线观看 | 国产精品久久久爽爽爽麻豆色哟哟 | 亚洲色成人网站www永久四虎 | 法国啄木乌av片在线播放 | 久久激情综合狠狠爱五月 | 50岁人妻丰满熟妇αv无码区 | 毛片女人18片毛片女人免费 | 黄色大片一级片 | 亚洲欧美一区久久牛牛 | 久久久亚洲精华液精华液精华液 | 亲嘴扒胸摸屁股激烈网站 | 国产让女高潮的av毛片 | 女人18毛片一区二区三区 | 欧美丰满熟妇bbb久久久 | 五月天综合社区 | 77777五月色婷婷丁香视频在线 | 人人妻人人爽人人澡人人 | 日本成片区免费久久 | 一本无码中文字幕在线观 | 国产又粗又硬又大爽黄 | 国产成人精品一区二区在线小狼 | 久久精品网站视频 | heyzo亚洲| 91高潮大合集爽到抽搐 | 欧美日韩精品二区 | 男人天堂久久久 | 精品亚洲国产成人蜜臀av | 妇欲欢公爽公妇高h苏晴 | 天天弄天天模 | 国产福利免费视频不卡 | 亚洲第一免费视频 | 国产三级在线观看视频 | 秋霞无码一区二区 | 无卡无码无免费毛片 | 免费成人黄色片 | 亚洲中文字幕久久精品无码app | 亚洲精品无码专区在线观看 | 色99久久久久高潮综合影院 | 国产人妇三级视频在线观看 | 伊人久久大香线蕉精品 | 亚洲一区av无码少妇电影玲奈 | www.涩涩爱 | 真实国产乱子伦对白视频不卡 | 国产在线精品一区二区在线观看 | 欧美最爽乱淫视频播放 | 色咪咪网站 | 377p欧洲日本亚洲大胆噜噜 | 丰满多毛的大隂户毛茸茸 | 国产区一二三 | 国产超爽人人爽人人做人人爽 | 国产超碰人人做人人爱一二区视品 | 国产在线精品无码二区 | 久久久国产一区二区三区四区 | a级片免费网站 | 果冻传媒mv免费播放在线观看 | 亚洲一区二区91 | 人人澡人人人人天天夜夜 | 国产亚洲精品久久久久久无几年桃 | 四虎永久在线精品无码视频 | 日韩在线视频不卡 | 无码精品国产dvd在线观看9久 | 成人亚洲性情网站www在线观看国产 | 中文字幕一区二区三区四区 | wwwxxx日本人 | 国产精品55夜色66夜色 | 中文字幕人妻中文av不卡专区 | 996热re视频精品视频这里 | 动漫成人无码免费视频在线播 | 忘忧草社区在线www 国产视频亚洲 | 欧美国产日韩a在线观看 | 日韩精品免费一线在线观看 | 91日韩精品久久久久身材苗条 | 国产网红主播av国内精品 | 强奷乱码中文字幕熟女导航 | 久久精品一区二区三区不卡牛牛 | 天天草比 | 欧美日韩国产精品成人 | 精品欧美一区二区久久久伦 | 色婷婷视频在线观看 | 亚洲无线观看国产精品 | 少妇与黑人一二三区无码 | 麻豆一区二区三区精品视频 | 射精专区一区二区朝鲜 | 日本不卡高字幕在线2019 | 日韩avxxx| 欧美成人不卡视频 | 亚洲精品国偷自产在线 | 羞羞av.tv | 国产99视频精品免费视频76 | 无码人妻精品一区二区三区99仓本 | 裸体性做爰免费视频网站 | 8x8ⅹ8成人免费视频观看 | 亚洲va中文在线播放 | 国产a∨国片精品白丝美女视频 | 久青草久青草视频在线观看 | 亚洲免费在线视频 | 夜夜高潮夜夜爽夜夜爱爱 | 亚洲蜜桃av一区二区 | 永久免费的网站入口 | 肉体裸交137日本大胆摄影 | zzjizzji亚洲日本少妇 | 国产精品aaaa | 亚洲色图88 | av无码国产在线看免费网站 | 日韩成人久久 | 国产极品探花一区二区三区 | 国产小屁孩cao大人免费 | 亚洲性久久9久久爽 | 香蕉综合在线 | 国产精品无码久久av嫩草 | 农村妇女愉情三级 | 新版本天堂资源在线中文8的特点 | 922tv在线观看线路一 | 色在线免费视频 | 精品一区二区三区在线观看 | 国产成人啪精品午夜网站 | 三级伊人| 国产又湿又黄又硬又刺激视频 | 交换配乱吟粗大农村大坑性事视频 | 精品免费一区二区三区在 | 精品黄色在线观看 | 99ri国产| yy成人综合网 | 亚洲va久久久噜噜噜久久4399 | 亚洲偷偷| 人妻中出受孕 中文字幕在线 | 国产艳妇av视国产精选av一区 | 国产成+人+综合+亚洲欧美 | 国产午夜精品福利视频 | 天天夜夜草 | 一个人看的www视频在线观看 | 蜜桃视频插满18在线观看 | 香蕉综合视频 | 久久久国产99久久国产久灭火器 | 亚洲六月丁香六月婷婷 | 18禁黄久久久aaa片 | 亚洲欧美另类精品二区 | 日本韩国欧美中文字幕 | 色噜噜狠狠综曰曰曰 | 免费在线观看黄 | 久久99精品国产 | www.日日干 | 国产男女免费完整视频 | 国产精品视频2020年最新视频 | 四虎成人久久精品无码 | 国产蜜臀97一区二区三区 | 国产激情a| 国内丰满熟女出轨videos | 久久综合9988久久爱 | 男人女人黄 色视频免费 | 放荡的美妇在线播放 | 欧美成人精品高清视频在线观看 | 欧美精欧美乱码一二三四区 | 在线看mv的网址入口 | www国产精品内射老熟女 | 丰满熟妇人妻中文字幕 | 999国产精品 | 欧美日韩中文在线 | 午夜在线国语中文字幕视频 | 黄色精品一区 | 拔插拔插海外华人免费视频 | 日韩人妻无码精品-专区 | 韩国r级hd中文字幕 屁屁国产第一页草草影院 美女隐私免费看 | 大波大乳videos巨大 | 免费一区二区三区四区 | 97青娱国产盛宴精品视频 | 亚洲乱色 | 人妻丰满熟妇av无码区免 | av草逼| 人人澡人人妻人人爽人人蜜桃麻豆 | 韩国午夜福利片在线观看 | 中文字幕一区二区在线播放 | 亚洲一区二区色一琪琪 | 肥白大屁股bbwbbwhd | 中文在线天堂а√在线 | 亚洲羞羞| 久热这里在线精品 | a欧美亚洲日韩在线观看 | 久久手机免费视频 | 国产福利在线观看免费第一福利 | 秋霞欧美一区二区三区视频免费 | av大全在线观看 | 亚洲gv永久无码天堂网 | 久久久青草婷婷精品综合日韩 | 精品无人区一区二区 | 一本色道久久综合狠狠躁邻居 | 国产91在线播放9色不卡 | 91九色porny国产探花 | 亚洲精品国男人在线视频 | 精品亚洲网站 | 漂亮少妇videoshd忠贞 | 好大好深好猛好爽视频 | 麻豆国产精品va在线观看 | 国产又黄又爽又刺激的免费网址 | 国外精品jvid在线观看 | 亚洲色欲啪啪久久www综合网 | 日批视频网站 | 亚洲欧美一 | 草的我好爽视频 | 精品伊人久久久大香线蕉下载 | 97在线播放免费观看 | 国产对白不带套毛片av | 欧美久久久久久久久久久久 | 午夜宅男在线永久免费观看网 | 性男女做视频观看网站 | 亚洲另类丝袜综合网 | 曰本无码不卡高清av一二 | 亚洲欧美高清在线精品一区二区 | 一本一道av无码中文字幕﹣百度 | 午夜理论片福利在线观看 | 91丨九色丨蝌蚪丨老版 | 久久久噜噜噜久久久白丝袜 | 韩国和日本免费不卡在线v 三浦步美一区二区三区 | 国产精品久久久久久人妻无 | 精品国产一区二区三区免费 | 可以看av的网站 | 在线播放无码高潮的视频 | 下面一进一出好爽视频 | 长篇乱肉合集乱500小说日本 | 亚洲国产片 | 乱人伦人妻中文字幕 | 17c在线视频在线观看 | 成人免费直播 | 九九热在线视频观看这里只有精品 | 中文字幕乱码人妻无码久久 | www久久九| 怡春院在线视频 | 好吊色在线观看 | 中文亚洲无线码49vv | 亚洲永久免费 | 精产国品一区二区三区四区 | 日产乱码一区二区三区在线 | 真实的国产乱ⅹxxx66小说 | 黄色视屏软件 | 亚洲国产av无码一区二区三区 | 久久99精品国产99久久6尤物 | 国产70老熟女重口小伙子 | 国产片av片永久免费观看 | 久久久久久亚洲精品无码 | 中国大陆精品视频xxxx | 国产成人成网站在线播放青青 | 69国产视频| 亚洲啪啪综合av一区 | 免费一级男女裸片 | 饥渴丰满少妇大力进入 | 成人秘密在线观看 | 人妻熟妇乱又伦精品视频中文字幕 | 久久久精品中文字幕麻豆发布 | 一二三国产777avav | 国产免费又黄又爽又刺激蜜月al | 天天弄 | 免费午夜福利不卡片在线播放 | 91视频专区 | 丰满少妇高潮在线播放不卡 | www.国产视频.com| 欧洲熟妇色xxxxx欧美老妇伦 | 免费国产自线拍一欧美视频 | 韩日中文字幕 | 国产精品国产三级国av在线观看 | 国内毛片毛片毛片毛片毛片 | 国产一卡2卡3卡4卡精品 | 久久精品成人免费国产片小草 | 国产精品人人做人人爽人人添 | 少妇放荡的呻吟干柴烈火免费视频 | 色爱综合激情五月激情 | 波多野吉衣av | 欧美激情在线看 | 久久99精品久久久久久狂牛 | 久久精品人妻无码专区 | 欧美黑人精品一区二区不卡 | 欧美在线人视频在线观看 | 久久国产午夜精品理论片最新版本 | 亚洲乱亚洲乱妇在线 | 阿v天堂网| 亚洲的天堂av无码 | 亚洲中久无码永久在线观看软件 | 国产午睡沙发被弄醒完整版 | 夜夜夜躁高潮天天爽 | 99日本精品永久免费久久 | 免费国产成人 | 在线观看免费av网 | 特黄色一级片 | 日本少妇寂寞少妇aaa | 真实国产精品视频400部 | 亚洲综合激情在线 | 精品国产一区二区av片 | 白白嫩嫩的美女无套内谢 | 欧美精品1区 | www.香蕉视频在线观看 | 亚洲精品av一二三区无码 | 国产精品民宅偷窥盗摄 | 99国产精品欧美一区二区三区 | www国产成人免费观看视频 | 国产办公室秘书无码精品99 | 国产三级在线观看视频 | 中文字幕人成无码人妻 | 激情综合色综合啪啪五月丁香 | 一区二区国产精品 | 免费看男女做爰爽爽 | 超碰免费在线播放 | 182tv国产免费观看软件 | www.天天干| 91极品在线| 日本三级全黄少妇三2020 | 被技师按摩到高潮的少妇 | 欧美成妇人吹潮在线播放 | 国产福利社 | 国产成人免费永久在线平台 | 久久久久久无码午夜精品直播 | 日韩av网站在线播放 | 97精产国品一二三产区在线 | a级毛片蜜桃成熟时2在线播放 | 国产精品乱子伦xxxx | 关秀媚三级露全乳视频 | 日本一区二区无卡高清视频 | 黄色av免费 | 久久久777| 久久露脸国产精品 | 免费人成在线观看网站 | 久久久久久久久久网站 | av在线网址大全 | 国内成人精品2018免费看 | 麻豆国产一区二区三区四区 | 国产精品久久久久久久久久久免费看 | 国产精品无码一区二区桃花视频 | 91亚洲欧美中文精品按摩 | 精品乱码一区二区三四区视频 | 91一区在线 | 99国产精品永久免费视频 | 国产成人精品.视频 | 国产果冻豆传媒麻婆精东 | 免费国精产品—品二品 | 女人的天堂av在线 | 亚洲视频1 | 18禁床震无遮掩视频 | 国产又大又黑又粗免费视频 | 91日批| 国产污视频网站 | 亚洲女女女同性video | 老司机成人永久免费视频 | 免费在线色 | 国产在线拍揄自揄视频网站 | 国产福利视频在线精品 | 色婷婷久久综合中文久久一本 | 亚洲 精品 制服 校园 无码 | 九九热国产视频 | 欧美人与动性行为视频 | 国产sm调教视频在线观看 | 偷窥自拍青青草 | 色 亚洲 日韩 国产 综合 | 久草播放 | www.操操操| 天堂久久爱资源站www | 成人免费视频无码专区 | 国产精品美脚玉足脚交欧美 | 国产精品人人 | 99精品免费观看 | 曰韩无码av片免费播放不卡 | 后入内射无码人妻一区 | 国偷自产一区二视频观看 | 久久12| 国产精品成年片在线观看 | 欧美日韩一二三区 | 老师黑色丝袜被躁翻了av | 久久久久综合精品福利啪啪 | 色综合综合网 | 欧产日产国产精品99 | 日韩av一级| 最新国产亚洲人成无码网站 | 在线视频天堂 | 91精品国产91久久久久游泳池 | 日本一级中文字幕久久久久久 | 欧美网站在线观看 | 国产美女精品自在线拍免费 | 日本欧美在线观看视频 | 久久国产精品二国产精品 | 成人做爰高潮片免费视频九九九 | 欧美精品一国产成人综合久久 | 亚洲精品午夜无码专区 | 日本在线 | 国产无遮挡呻吟娇喘视频 | aaa少妇高潮大片免费看088 | 成·人免费午夜视频香蕉 | 少妇乳大丰满在线播放 | 国产在线精品播放 | 日本美女一区二区 | 国产在线观看精品一区二区三区 | 亚洲无亚洲人成网站9999 | 欧美不卡影院 | 中国丰满少妇人妻xxx性董鑫洁 | 成人在线视频观看 | 舒淇三级露全乳视频在 | 亚洲精品国产综合99久久夜夜嗨 | 性无码免费一区二区三区在线网站 | 国产+高潮+白浆+无码 | 国内精品久久久久久久 | 亚洲精品久久久久久久不卡四虎 | 午夜免费看片 | av不卡网站 | 7m第一福利500精品视频 | 麻豆tv在线 | 玩爽少妇人妻系列视频 | 黑人爱爱视频 | h毛片 | 久久99精品久久久久久齐齐 | 国产精品久久久久久婷婷动漫 | 日本美女日批视频 | 午夜成年视频 | 亚洲视频一区二区在线 | 亚洲情a成黄在线观看动漫尤物 | 亚洲精品国产精品乱码不卡√香蕉 | 亚洲久悠悠色悠在线播放 | 黄色日批| 久久伊人一区 | 秘密爱大尺度做爰呻吟 | 国产精品极品白嫩在线 | 91精品国产91久久久久游泳池 | 国产精品亚洲一区二区z | 大色综合色综合网站 | 国产精品视频第一页 | 少妇捆绑紧缚av | 久久天堂网 | 国产精品无码av一区二区三区 | 大香伊人| 97精品伊人久久大香线蕉app | 亚洲射| 欧美交换配乱吟粗大免费看 | 亚洲国产精品va在线看黑人 | 果冻传媒剧国产剧情mv在线 | 成人精品水蜜桃 | 国产97碰免费视频 | 狠狠色狠狠色综合日日92 | 精品久久久久久人妻无码中文字幕 | 亚洲综合色区无码专区 | www成年人视频 | 久久综合九色欧美综合狠狠 | 国产在线高清视频无码 | 国产wwwwwww| 色欧美88888久久久久久影院 | 丰满少妇在线观看资源站 | 欧美日韩亚洲综合 | 成人午夜精品一区二区三区 | 野花社区在线观看视频 | 午夜激情视频网 | 亚洲三级欧美 | 国产成人久久综合第一区 | 黄色av免费在线看 | 露出调教羞耻91九色 | 丁香六月天婷婷 | 狠狠色婷婷久久一区二区 | 欧美大片在线免费观看 | 精品一区二区三区免费毛片爱 | 久久艹国产精品 | 久色影视 | 中文字幕免费中文 | 亚洲精品久久久久中文字幕 | 成人性生生活a | 国产欧美三级 | 国产v亚洲v天堂a无码 | 天天摸天天做天天爽天天弄 | 色婷婷av一区二区三区之红樱桃 | 亚洲色欲色欲高清无码 | 性xxx18| 69a∨色欧美丰满少妇 | 精品久久久久久久久久久 | 国产精成人品日日拍夜夜免费 | 四虎国产精品亚洲一区久久特色 | 色婷婷av一区二区三区丝袜美腿 | 久久人人爽爽人人爽人人片av | 色午夜av| 成人在线观看小视频 | 99re这里只有精品在线观看 | 91精品啪在线观看国产81旧版 | 91九色论坛| 中文字幕在线不卡精品视频99 | 亚洲最大的网站 | 日韩av影视大全 | 女人真人毛片全免费看 | 久久不射视频 | 99色精品 | 欧美女人交配视频 | 免费看片啪啪tv | 亚洲色图图 | 久久伊人少妇熟女大香线蕉 | 中文字幕无线码一区二区 | 免费成年人视频在线观看 | 一级片视频播放 | 石原莉奈在线播放 | 无遮挡呻吟娇喘视频免费播放 | 亚洲国产无 | 国产精品成人亚洲一区二区 | 国产永久在线观看 | 欧美午夜在线视频 | 美女看片 | 成人免费观看在线视频 | aaa欧美色吧激情视频 | 91区| 黑人强伦姧人妻日韩那庞大的 | 久久精品国产精品亚洲精品 | 人人做人人爽久久久精品 | 亚洲色图欧洲色图 | 成人免费无尽视频 | 白人と日本人の交わりビデオ | 黄色日批| 国产成人午夜 | 99re中文字幕| 天天操网站 | 国产亚洲制服免视频 | 99自拍| 亚洲欧洲综合 | 亚洲欧美成人aⅴ大片 | 一本之道中文日本高清 | av大片免费观看 | 一本加勒比北条麻妃 | 成人有色视频免费观看网址 | 国产男女免费完整视频网页 | 久久视频在线免费观看 | 亚洲少妇网站 | www91亚洲| 闺蜜张开腿让我爽了一夜 | 午夜福利国产精品久久 | 成人国产精品??电影 | 91精品国产乱码久久久久 | 丰满饥渴老女人hd69av | 亚洲精品成人片在线播放 | 日韩av网址大全 | 91成人国产| 一级片的网站 | 国产免费的又黄又爽又色 | 无码熟熟妇丰满人妻啪啪 | 精品人妻系列无码人妻在线不卡 | 韩国 欧美 日产 国产精品 | 久久99精品久久水蜜桃 | 99re视频热这里只有精品38 | 久久综合一本 | 欧美人与zoxxxx另类 | 久久中文字幕伊人小说小说 | 香蕉免费一区二区三区在 | 久久久国产精品视频 | 蜜桃网站入口在线进入 | 六月丁香亚洲综合在线视频 | 一本一道久久a久久精品综合蜜臀 | 和黑人邻居中文字幕在线 | 毛片视屏| 全肉乱妇杂乱视频在线观看 | 国产成人av三级在线观看 | 冲田杏梨av一区二区三区 | 无码h肉在线观看免费一区 国产av福利久久 | 人妻体体内射精一区二区 | 夜夜摸日日躁欧美视频 | 日韩少妇人妻vs中文字幕 | 国产日韩精品入口 | 色综综 | 女人裸体做爰免费视频 | 99久久国语露脸精品国产 | 久夜精品 | 女人爽到高潮免费看视频 | 国产精品老女人 | 日日射av | 澳门av网站| 欧美无乱码久久久免费午夜一区 | 精品少妇爆乳无码av无码专区 | av网址观看 | 少女高清影视在线观看动漫 | 国产丰满大乳奶水在线视频 | 国产最爽乱淫视频国语对白 | 男人亚洲天堂 | 午夜福利理论片高清在线观看 | 涩视频在线观看 | 无码人妻精品一区二区三 | 久久综合给合久久国产免费 | 免费观看全黄做爰的视在线观看 | 国产又大又长又粗 | 99色综合网 | 亚洲综合久久精品无码色欲 | 色36cccwww在线播放 | 亚洲乱码精品久久久久.. | 国产免费又爽又色又粗视频 | 精精国产xxxx视频在线 | 欧美阿v天堂视频在99线 | 活大器粗np高h一女多夫 | 日韩一区二区三区射精-百度 | 97se亚洲国产综合自在线不卡 | 91视频中文| 亚洲aⅴ无码专区在线观看春色 | 人成乱码一区二区三区 | 欧美人与动另类xxxx | 国产理论在线观看 | 亚洲第一二三四区 | 少妇被猛烈进入到喷白浆 | 久久人人玩人妻潮喷内射人人 | 国产精品午夜性视频 | 无码精品国产一区二区三区免费 | 国产偷国产偷亚洲清高孕妇 | 国产一卡二卡三卡四卡 | √最新版天堂资源在线 | 舌头伸进去添的我好爽高潮欧美 | 美女亚洲一区 | 激情无码人妻又粗又大中国人 | 人妻三级日本香港三级极 | 亚洲色在线v中文字幕 | 成人免费高清在线播放 | 国产无套粉嫩白浆内的人物介绍 | 国产精品性生活 | 成人羞羞视频国产 | 岛国午夜视频 | 无码人妻丰满熟妇区五十路在线 | 亚洲精品久久久一线二线三线 | 国产高清美女一级a毛片久久w | 日本少妇xxx做受 | 国产在线精品一区二区不卡麻豆 | 深夜福利av| 在线 偷窥 制服 另类 | 免费无码无遮挡裸体视频在线观看 | 成人片在线观看地址kk4444 | 性视频网站免费 | 亚洲国产中文在线 | www.亚洲精品 | 狠狠色丁香婷婷第六色孕妇 | 熟妇人妻中文字幕 | 日韩人妻潮喷中文在线视频 | 国产v在线在线观看视频免费 | 毛葺葺老太做受视频 | 深夜视频在线播放 | 成人av免费在线播放 | 精品欧美一区二区在线观看 | 国产精品久久综合免费 | 亚洲精品永久在线观看 | 日韩精品a在线观看 | 国产日韩精品欧美一区喷水 | 国产av综合影院 | 久久成人亚洲 | 成人免费毛片网站 | 国产精品青青青在线观看 | 国产精品无码v在线观看 | 国产成人午夜福利在线观看视频 | 中文天堂最新版资源www官网 | 欧美性天天影院 | 中文字幕无码av激情不卡 | 亚洲国产视频在线观看 | 1级av| 天天看天天爽 | 国产超碰人人做人人爰 | 人妻丰满熟妇av无码区app | 日韩精品在线观看视频 | 中文字幕在线观看网站 | 在线观看国产xxx视频 | 久久久www成人免费无遮挡大片 | 色综合天天综合网中文 | 久久69国产精品久久69软件 | 中文字幕乱码人妻一区二区三区 | 亚洲高清在线免费观看 | 强迫大乳人妻中文字幕 | 成人18视频日本 | 亚洲人成777| 国产男生夜间福利免费网站 | 亚洲福利专区 | 本田岬高潮一区二区三区 | 国产福利第一视频 | 中文字幕色 | 国产欧美日韩久久久久 | 亚洲色婷婷久久精品av蜜桃 | 亚洲国产精品无码中文字app | 麻豆av一区二区三区久久 | 天天爽夜夜爽夜夜爽 | 91免费视频网址 | 黄色国产 | 亚洲自拍中文 | 亚洲精品国产一区二区精华液 | a级黄色录像片 | 成人无遮挡裸免费视频在线观看 | 精品无人区无码乱码毛片国产 | 亚洲精品suv精品一区二区 | 狠狠综合久久av一区二区老牛 | 污污网站在线播放 | 国内露脸中年夫妇交换 | 一级片在线免费观看 | 18禁美女裸身无遮挡免费网站 | 男女性爽大片视频免费看 | 涩涩小网站| 好吊妞视频788gao在线观看 | 亚洲久视频 | 午夜视频在线免费观看 | 国产又粗又硬又大爽黄老大爷视频 | 疯狂添女人下部视频免费 | 精品国产三级大全在线观看 | 91网站在线免费观看 | 欧美一级片播放 | 国色天香社区在线视频 | 2019午夜三级网站理论 | 国产欧美va天堂在线观看视频 | 日日草草 | 免费欧美一级片 | 九色福利视频 | 亚洲国产精品区 | 国产女爽爽视频精品免费 | 国产乱来视频 | 7777少妇色视频免费播放 | 国产精品伦一区二区三区在线观看 | 18禁动漫美女禁处被爆桶出水 | 亚洲αv在线精品糸列 | 日本美女极度性诱惑卡不卡 | 肉色欧美久久久久久久免费看 | 国产成人麻豆精品午夜福利在线 | 国产精品伦一区二区 | 欧美自拍第一页 | 成年无码动漫av片在线尤物网站 | 1000部拍拍拍18勿入免费视频 | wwwyjizcom性欧美 | 91丨九色丨黑人外教 | 超碰在线公开免费 | 狠狠色狠狠色综合日日五 | 欧美日韩精品一区二区性色a+v | 麻豆一二三四区乱码 | 日本性视频网站 | 人妻互换一二三区激情视频 | 国产色午夜婷婷一区二区三区 | 大胸奶汁乳流奶水出来h | 成人欧美一区 | 成人无码a片一区二区三区免 | 国产黄色在线 | 久久精品成人免费观看97 | 欧美z0zo人禽交另类视频 | 日本少妇又色又爽又高潮看你 | 免费在线欧美 | 52avaⅴ我爱haose免费视频 | 极品少妇粉嫩小泬v片可看 真人与拘做受免费视频一 91久久国产自产拍夜夜嗨 | 搡8o老女人老妇人老熟 | 日本高清在线一区二区三区 | 国内毛片毛片毛片毛片毛片 | 天堂国产+人+综合+亚洲欧美 | 欧美性色黄大片a级毛片视频 | www成人网com | 亚洲欧美自拍偷拍 | 国模大尺度一区二区三区 | 日韩欧美亚洲中文乱码 | 中文字幕视频网站 | xxxxⅹxxxhd日本8hd | 少妇又紧又色又爽又刺激的视频 | 人人干人人看 | wwwww在线观看 | 99re视频| 国内精品九九久久精品 | 台湾佬自拍偷区亚洲综合 | 亚洲综合一 | 7777精品伊久久久大香线蕉 | 岛国精品在线观看 | 久久爱涩涩www | 台湾精品一区二区蜜桃 | 久久人人添人人爽添人人88v | 国产女人18毛片水真多1 | 欧美日韩激情 | 久久大综合| 欧美极品在线播放 | 国产欧美日韩亚洲一二三区 | 99久久国产综合精品1 | 色情久久久av熟女人妻网站 | 男女精品国产乱淫高潮 | 欧美性xxxx极品hd大豆行情 | 人人模人人爽人人喊久久 | 成熟人妻av无码专区 | 进去里视频在线观看 | 在线观看的av网址 | 男人的天堂一区二区 | 超碰神马| www.com欧美| 国产无遮挡又黄又爽不要vip网站 | 特黄特色大片免费播放器下 | 亚洲日韩国产二区无码 | 亚洲高清免费观看 | 亚洲精品一线二线三线无人区 | 五月激情婷婷综合 | 三级国产国语三级在线 | 亚洲综合色成在线观看 | 成人av毛片| 欧美一级片在线看 | 一本到高清 | 免费人妻无码不卡中文视频 | 欧美日韩大片 | 婷婷情更久日本久久久片 | 亚洲视频免费在线 | 精品香蕉久久久午夜福利 | 久久视频在线观看精品 | 国产乱来乱子视频 | 国产精品乱码一区二区三区视频 | 丰满少妇大叫太大太粗 | 人人妻人人澡人人爽精品日本 | 最近中文字幕在线中文视频 | 国产毛毛片| 国产精品久热 | 洗澡被公强奷30分钟视频 | 午夜精品久久久久久久蜜桃 | 成在线人免费视频一区二区 | 亚洲小说区图片区另类春色 | 777米奇色狠狠俺去啦 | 女人被狂c躁到高潮视频 | 亚洲欧洲日产国产av无码 | 国产做爰又粗又大又爽动漫 | 久久久久久久网 | 人妻熟妇乱又伦精品视频中文字幕 | 黑人操亚洲女 | 成人亚洲a片v一区二区三区蜜臀 | 麻豆天天躁天天揉揉av | av一级二级 | 日本国产制服丝袜一区 | 国产欧美亚洲精品a | 一区二三区在线 | 中国 | 中文字幕制服丝袜 | 88国产精品欧美一区二区三区 | 大屁股大乳丰满人妻 | 日韩精品一线二线三线 | 亚洲人成网址在线播放小说 | 日本中文字幕网站 | 亚洲va无码专区国产乱码 | 亚洲综合另类小说色区一 | 亚洲v不卡ww在线 | 国产91对白叫床清晰播放 | 色婷婷激情 | 欧美丰腴丰满大屁股熟妇 | 无遮挡高潮国产免费观看 | 邻居少妇张开双腿让我爽一夜 | 国产区又黄又硬高潮的视频 | 日本乱妇乱子视频 | 调教一区二区三区 | 国产精品久久久久无码av1 | 国产精品麻豆成人av在线观看 | 毛片内射-百度 | 极品 在线 视频 大陆 国产 | 超碰区| 国产欧美日韩另类精彩视频 | 九九九免费视频 | 乱人伦人妻中文字幕不卡 | 国产又粗又猛又爽又黄的网站 | 91网页入口 | 在线看毛片的网站 | 动漫av一区二区在线观看 | 久久成人激情 | 肉丝美脚视频一区二区 | 欧美一级黄色网 | 亚洲精品久久久久久宅男 | 黄又色又污又爽又高潮 | 久久亚洲精品成人av | 日日摸夜夜添无码无码av | 免费无码黄网站在线看 | 西西人体大胆瓣开下部毛茸茸 | 日韩免费无码人妻波多野 | 欧美z0zo人禽交欧美人禽交 | 国产成人精品在线 | 精品视频导航 | av毛片在线播放 | 亚洲乱码国产乱码精品精网站 | 他揉捏她两乳不停呻吟在线播放 | 九九色在线 | www.国产三级 | 色99久久久久高潮综合影院 | 性开放的欧美大片 | 国产一区二区视频网站 | 欧美伦费免费全部午夜最新 | 伊伊人成亚洲综合人网 | 一道本视频在线观看 | 98国产精品 | 奶波霸巨乳一二三区乳 | 新婚之夜玷污岳丰满少妇在线观看 | 国产亚洲人成网站观看 | 亚洲国产成人精品无码区花野真一 | 久久久国产精华液 | 香蕉视频一区二区三区 | 国产精品久久久久久久久久久免费看 | 亚洲色偷偷色噜噜狠狠99网 | 天堂а√在线中文在线新版 | 久久大香焦 | 91中文啦 | 韩国三级中文字幕hd浴缸戏 | www夜夜爽| 日本一区二区三区爆乳 | 伊人青青草视频 | xxxeexxx性国产 | 91网在线| 色悠悠视频 | 欧美激情a∨在线视频播放 91沈先生在线 | 国产又色又爽又黄的 | 男人的亚洲天堂 | 四虎视频在线精品免费网址 | 天堂在线中文资源 | 99久久精品国产同性同志 | 国产图片一区 | a级片在线观看 | www一区二区乱码www | www色91| 品久久久久久久久久96高清 | 国产精品日韩一区二区 | 97国产精东麻豆人妻电影 | 亚洲a∨无码一区二区三区 天天综合网网欲色 | 222aaa免费国产在线观看 | 极品无码国模国产在线观看 | 天堂av一区 | 成人网址在线观看 | 亚洲一区在线观看视频 | 欧美 唯美 清纯 偷拍 | 熟妇人妻激情偷爽文 | 国色精品无码专区在线不卡 | 成人午夜影片 | 国产在线国偷精品免费看 | 久久伊人五月天 | 日本丰满少妇高潮呻吟 | 国产人成 | 成人午夜视频免费在线观看 | wwwcom国产| a三级三级成人网站在线视频 | 中文字幕在线观看一区二区三区 | 中文文字幕文字幕肉岳 | 欧美性bbw| 午夜精品久久久久久久99 | 女人大p毛片女人大p毛片 | 午夜福利啪啪体验区 | 国产福利视频一区二区 | 乱中年女人伦av三区 | 精品免费一区二区在线 | 偷拍女人私密按摩高潮视频 | 干欧美| 夫の友人 风间ゆみ 在线 | 国产成人三级在线 | 日韩黄色a级片 | 人摸人人人澡人人超碰97 | 天天碰免费上传视频 | 成人性生交片无码免费看 | 国产精品国产三级国产不产一地 | 一级做性色α爱片久久毛片色 | 亚洲乱妇老熟女爽到高潮的片 | 苍井空一区二区波多野结衣av | 精品久久8x国产免费观看 | 无码国产69精品久久久久孕妇 | 欧美精品成人在线 | 久久久久一 | 亚洲精品国产精品成人不卡 | 天堂а√在线地址 | 欧美日韩精品一区二区三区 | 亚洲欧美人成网站在线观看看 | 久久亚洲色www成人欧美 | 女女同性女同区二区国产 | 玩弄japan白嫩少妇hd | 国产精品a免费一区久久电影 | 欧美尺寸又黑又粗又长 | 中文成人无字幕乱码精品区 | 成人毛片在线 | 午夜视频入口 | 免费国产在线视频 | 亚洲美女视频在线 | 久久综合av色老头免费观看 | 特一级一性一交一视一频 | www.人人草 | 欧美日韩精品一区二区在线播放 | 亚洲精品国产一区二区在线观看 | 国产精品18久久久久久久久 | 杨幂毛片午夜性生毛片 | 精品成人毛片一区二区 | 日产韩产麻豆h | 天天干夜夜骑 | 国产69精品久久久久9999apgf | 国产中文字幕乱人伦在线观看 | 日韩aa| 国产suv精品一区二区69 | 69精品欧美一区二区三区 | 国产在线午夜不卡精品影院 | 亚洲色大成成人网站久久 | 成人欧美一区二区三区黑人一 | 老女人毛片50一60岁 | 色视频在线观看 | 国产成人久久 | 国产成人无码a在线观看不卡 | 日韩欧美一区二区三 | 中文字幕久无码免费久久 | 麻豆传传媒久久久爱 | 亚洲成人综合网站 | 日韩精品一级 | 久久久久人妻一区精品色 | 尤物99国产成人精品视频 | 久草在线综合 | 亚洲中文字幕无码中文字在线 | 国产99久久久久久免费看农村 | 日韩av片观看 | 超碰激情在线 | 55久久| 亚洲深爱 | 国产影视一区二区 | 中日韩黄色片 | 就要干就要操 | 人妻丝袜中文无码av影音先锋 | 人妻aⅴ中文字幕无码 | 少妇aa | 欧美激情h| 国产成人高清亚洲一区妲妃 | 亚洲啪av永久无码精品放毛片 | 国产干干干 | 亚洲这里只有久热精品伊人 | 国产又爽又黄又舒服的视频 | 亚洲日韩乱码中文无码蜜桃 | a久久久久 | 嫩草av影院 | 好吊妞人成视频在线观看强行 | 国产黄大片在线观看 | 国产福利视频一区二区在线 | 2018天天拍拍天天爽视频 | 刘亦菲国产毛片bd | 成人av一区二区免费播放 | 可以看三级的网站 | av在线无码专区一区 | 97久久草草超级碰碰碰 | 少妇高潮灌满白浆毛片免费看 | 久久精品国产再热青青青 | 日韩夜夜高潮夜夜爽无码 | 国产边摸边吃奶叫床视频 | 在线播放国产精品 | 国产女人高潮抽搐喷水视频 | 国产女主播喷水视频在线观看 | 日本肉体xxxx裸体137大胆图 | 成人午夜高潮刺激免费视频 | 亚洲人免费视频 | 春药按摩人妻弓中文字幕 | 99久久久无码国产精品秋霞网 | 色男人网| 午夜少妇拍拍视频在线观看 | 一区二区无码免费视频网站 | 日本少妇被黑人xxxxx | 99自拍偷拍 | 国产成人av在线免播放观看 | 日本少妇做爰奶水狂喷小说 | 成人动漫在线观看免费 | 999精品色在线播放 2021国产成人精品久久 | 好紧好爽再进去一点在线视频 | 国产免费mv大片人人电影播放器 | 久久久黄色片 | 欧美xxxx×黑人性爽 | 亚洲一区自拍高清亚洲精品 | 日本精品αv中文字幕 | 色婷婷狠狠五月综合天色拍 | 妓女妓女一区二区三区在线观看 | 欧美视频中文在线看 | 国产乱子伦60女人的皮视频 | 久久www免费人成_看片中文 | 国产成人精品久久一区二区 | 成年无码动漫av片在线尤物网站 | 精品久久久久久久国产性色av | 国产下药迷倒白嫩丰满美女j8 | 亚洲日韩国产一区二区三区 | 亚洲a级女人内射毛片 | 亚洲成年网 | 人人玩人人添人人澡免费 | 看a网站 | 欧美中文字幕无线码视频 | 日本大尺度激情做爰电2022 | 日产精品久久久久久久 | a激情| yy1111111少妇影院乱码 | 精品av国产一区二区三区四区 | 肥臀浪妇太爽了快点再快点 | 黄色网址你懂得 | 无码熟妇人妻av在线网站 | 国产精品天天干 | 亚洲一级免费在线观看 | 337p日本大胆欧久久 | 精品黄色网 | 粉嫩久久久久久久极品 | 毛片大全免费看 | 国产在线观看无码不卡 | 2020国产精品午夜福利在线观看 | 四虎成人久久精品无码 | 97久久久人妻一区精品 | 精品久久久三级丝袜 | 欧美资源在线 | 欧美日韩一区二区三区四区五区 | 久久精品5 | 亚洲一区二区在线 | 中文毛片无遮挡高清免费 | 国产一级黄色录像 | 丰满爆乳一区二区三区 | 亚洲精品成人网站在线 | 亚洲精品久久激情国产片 | 综合图区亚洲欧美另类图片 | 欧美成人一区二区三区四区 | 中国国产免费毛卡片 | 91亚洲日本aⅴ精品一区二区 | 亚洲色欲色欲www在线丝 | 国产一区二区三区精品在线观看 | 在线观看jizz | 一区二区三区视频在线播放 | 日韩精品久久久久久久 | 手机福利视频 | 国产精品久久久久高潮 | 无码人妻精品一区二区三区蜜桃 | 亚洲精品小视频 | 国产成人精品亚洲一区 | 亚洲第一在线播放 | 特黄特色三级在线观看 | 国产爱豆剧传媒在线观看 | 最新国产福利在线观看精品 | 国产在线拍揄自揄视频网试看 | 天堂俺去俺来也www色官网 | 久久亚洲精品中文字幕一区 | 亚洲第一页在线 | 久久久久久九九精品久 | 无码精品人妻一区二区三区漫画 | 欧美精品一级在线观看 | wwwcomcn成人| 激情综合色五月六月婷婷 | 日日操操 | 成人之间dvd | 同性做爰猛烈全过程 | 久久女性裸体无遮挡啪啪 | 国产免费又色又爽又黄女性同恋 | 色久综合| 欧美比基尼 | 中文字幕在线观看亚洲视频 | 欧美特级婬片毛多的少妇 | 精品多人p群无码 | 另类亚洲欧美精品久久 | 亚洲精品视频久久 | 日韩三级大片 | 变态另类先锋影音 | 97av视频在线 | 欧美日韩tv | 久久国产福利 | 国产裸体无遮挡免费视频 | 欧美在线 | 亚洲 | 一本色道久久综合狠狠躁邻居 | 国内极品少妇1000激情啪啪千 | xxxx性洗澡xxxxⅹ | 波多野av一区二区无码 | 国产人妻精品一区二区三区不卡 | 日本边添边摸边做边爱 | 99热精品免费| 日韩av不卡在线观看 | 日本免费无遮挡毛片的意义 | 北京少妇宾馆露脸对白 | 日韩超碰在线 | 日本免费一区二区三区高清视频 | 国产萌白酱喷水视频在线观看 | 尤物av午夜精品一区二区入口 | 欧美成人一区二区三区片免费 | 亚洲精品成人无码中文毛片不卡 | 99产精品成人啪免费网站 | gv手机在线观看 | 日韩在线三区 | 毛片888 | 亚洲国产日韩欧美 | 国产精品毛片va一区二区三区 | 人妻熟妇乱又伦精品视频 | 亚洲精品亚洲人成人网 | 成人亚洲欧美一区二区三区 | 东京无码熟妇人妻av在线网址 | www17com嫩草影院 | 亚洲性人人天天夜夜摸18禁止 | 中日韩毛片 | 久久久久久无码日韩欧美 | 荫蒂被男人添的好舒服爽免费视频 | 又湿又黄裸乳漫画无遮挡网站 | 狠狠色图 | 91日韩精品久久久久身材苗条 | 国产精品96久久久久久 | 欧美在线精彩视频免费播放 | 中文有码视频在线播放免费 | 国产在线成人一区二区三区 | 国产美女精品人人做人人爽 | h狠狠躁死你h出轨高h | 无码人妻丝袜在线视频红杏 | 国产精品高潮呻吟久久久 | 麻花传媒剧国产mv高清播放 | 欧美日本91精品久久久久 | 久久99精品久久久久久园产越南 | 亚洲国产精品美女 | 欧美又粗又大又黄的片 | 国产精品7777cos | av高清免费 | 911亚洲精品 | 日韩综合无码一区二区 | 欧洲无码八a片人妻少妇 | 亚洲人成伊人成综合网久久久 | 老太婆性杂交欧美肥老太 | 欧美久久久久久久高潮 | 欧美性黄色 | 粉嫩91精品久久久久久久99蜜桃 | 3d动漫精品h区xxxxx区 | 国产三级三级看三级 | 午夜在线欧美蜜桃 | 色爽av| 五月婷婷激情第四季 | 亚洲 校园 春色.自拍 | 国产精品夜夜爱 | 男人午夜影院 | 孕妇性开放bbwbbwbbw | 五月伊人婷婷 | 97久久超碰国产精品旧版麻豆 | 99尹人香蕉国产免费天天 | 亚洲天堂99 | 蜜臀av无码国产精品色午夜麻豆 | 精品福利在线视频 | 少妇下蹲露大唇无遮挡0 | 欧美xxxx在线 | 久久国产色av | 午夜精品福利一区二区蜜股av | 内射口爆少妇麻豆 | av激情亚洲男人的天堂 | 成人做爰www免费看视频网站 | 亚洲无人区码一码二码三码的含义 | 久久99久久99精品免视看动漫 | 国产精品自在欧美一区 | 国内免费久久久久久久久 | 永久久久免费人妻精品 | 99久在线观看 | 成年人视频在线免费看 | 日韩精品一区二区三区第95 | 青娱乐最新网站 | 国产成人精品视频一区二区不卡 | 亚洲国产中文字幕在线视频综合 | 永久天堂网 av手机版 | 东北老头老太国产 | www.久久久久久久久 | 久久精品国产精品亚洲 | 人人做 | 国产肉体xxxx裸体137大胆 | 中文字幕日产无线码一区 | 中文字字幕人妻中文 | 国产成人精品网站 | 久久中文字幕亚洲精品最新 | 岛国精品 | 亚洲第一福利网站在线观看 | 美女毛片一区二区三区四区 | 亚洲国产美国国产综合一区二区 | 在线中文字幕亚洲日韩2020 | 天干夜天干天天天爽视频 | 国产麻豆放荡av剧情演绎 | 97超碰在线播放 | 巨爆乳中文字幕爆乳区 | 毛片完整版的免费观看 | 无码人妻丰满熟妇啪啪欧美 | 欧美亚洲图片小说 | 黑人巨大粗物挺进了少妇 | 免费人成在线观看网站免费观看 | 免费毛片大肚孕妇孕交av | av网站在线免费播放 | 国产精品特级毛片一区二区 | 欧美性生活 | 国产内射爽爽大片视频社区在线 | av无码天一区二区一三区 | 麻豆国产在线视频 | 免费成人看视频 | 一本久久伊人热热精品中文 | 日韩精品东京热无码视频 | 操三八男人的天堂 | 在线观看免费人成视频网 | www欧美国产 | 人妻精品久久无码区洗澡 | 超薄肉色丝袜一二三 | 久本草精品 | 国产亚洲欧洲 | 成色视频| 亚洲一区影视 | 制服丝袜人妻综合第一页 | 欧美亚洲韩国 | 日夜夜操 | 最近中文字幕mv免费高清在线 | 51久久| 国产成人av大片在线观看 | 国产精品丝袜黑色高跟 | 五月综合在线 | 中文字幕女同女同女同 | 精品无码久久久久成人漫画 | 欧美激情videos | 黄色影视频 | 国产精品久久久久久久妇 | 精品国产福利拍拍拍 | 55夜色66夜色国产精品视频 | 欧美牲交a欧美牲交vdo18 | 亚洲一区二区高潮无套美女 | 成人无码小视频在线观看 | 国内裸体无遮挡免费视频 | 亚洲一级二级视频 | 午夜精品免费观看 | 人妻无二区码区三区免费 | 久久综合区| 久久激情网站 | 国外av无码精品国产精品 | 亚洲日本在线电影 | 国产欧美久久一区二区三区 | 日韩aⅴ人妻无码一区二区 暖暖 免费 高清 日本 在线 | 国产传媒麻豆剧精品av | 米奇7777狠狠狠狠视频 | 亚洲色综合 | 78m成人永久免费78m | www.久久爽| 日本午夜免费福利视频 | 日本中文字幕网站 | 国产999在线观看 | 久草热视频 | 亚洲字幕在线观看 | 麻豆精品免费 | 亚洲欧美一级 | 大尺度做爰床戏呻吟舒畅 | 亚洲图片综合图区20p | 18禁美女裸体网站无遮挡 | 国产成 人 综合 亚洲网站 | www.com毛片 | 国内精品久久久久影视老司机 | 黄网站色视频免费国产 | 免费av一区 | 视频区图片区小说区 | 91黄在线观看 | 国产精品日韩在线 | 精品国产性色无码av网站 | 综合色九九| 久久影视中文字幕 | 亚洲大色堂| 亚洲色成人网站www永久男男 | 婷婷激情五月网 | 我们2018在线观看免费版高清 | 少妇夜夜春夜夜爽试看视频 | 韩国三级l中文字幕无码 | 狠狠色狠狠色综合日日92 | 人妻久久久一区二区三区 | 香蕉国产片一级一级一级一级 | www人人干| 亚洲欧美闷骚少妇影院 | 亚洲国产一区二区三区四区四季 | 99国内精品久久久久影院 | 老司机在线精品视频网站的优点 | 狠狠色丁香久久婷婷综合_中 | 中文字幕日本乱码仑区在线 | 激情文学亚洲 | 欧美成人伊人 | 黄色片久久久久 | 亚洲国产码专区 | 嫩草视频在线观看 | 亚洲午夜理论片在线观看 | 色婷婷av久久久久久久 | 日日拍拍 | 国产伦精品一区二区三区四区 | 好屌草这里只有精品 | 日韩少妇内射免费播放 | 疯狂欧美牲乱大交777 | 国产人妻精品一区二区三区不卡 | 女同 媚药 在线播放 | 亚洲午夜精品一区二区三区 | 久久香蕉国产线熟妇人妻 | av免费在线观看免费 | 精品一区二区三区毛片 | 乱人伦xxxx国语对白 | 性视频网站免费 | 日本裸体精油4按摩做爰 | 老司机深夜福利网站 | 性按摩玩人妻hd中文字幕 | 日韩免费福利视频 | 日本黑人一区二区免费视频 | 三级全黄的女人高潮叫 | 四虎成人精品在永久在线 | 1313午夜精品理论片 | 亚洲第一色播 | 毛片大全免费 | 久久一区二区三区视频 | 国产丰满农村老妇女乱 | 久久精品免费国产大片 | 国产一级视频免费看 | 午夜福利一区二区三区在线观看 | 精品免费久久久久久久 | 中文字幕人妻丝袜成熟乱 | 久久久久999| 精品97国产免费人成视频 | 国产各种高潮合集在线观看 | 97caop| 欧美巨猛xxxx猛交黑人97人 | 第一区免费在线观看 | 永久免费无码网站在线观看个 | 免费体验区试看120秒 | 人妻 日韩精品 中文字幕 | 69国产精品久久久久久人妻 | 久久欧美一区二区三区性生奴 | 森泽佳奈作品在线观看 | 国产日产亚洲系列最新 | 欧美午夜性囗交xxx╳ | 久久久久久无码精品人妻a片软件 | 欧美激情一区二区三区p站 中国少妇乱子伦视频播放 国产美女遭强被高潮网站 91视频精选 | 成人影院www蜜桃网站 | 国产精品久久久久一区二区三区 | 国产免费又爽又刺激在线观看 | 国产hxc132乱人免费视频 | 波多野结衣视频观看 | 91毛片在线观看 | 国产福利在线视频蜜芽tv | 俺来也av | 99精品久久久久久久免费看蜜月 | 日韩三级一区二区 | 伊人亚洲大杳蕉色无码 | 一区二区视频免费 | 风间由美一区二区av101 | 天天天天做夜夜夜夜做无码 | 天天色棕合合合合合合合 | 欧美成本人视频免费播放 | 欧美一级α片 | 最新国产精品无码 | 中文字幕乱视频 | 无码专区—va亚洲v天堂 | 日本黄色美女网站 | 成人欧美一区二区三区黑人孕妇 | 337p亚洲欧洲色噜噜噜 | 欧美综合在线激情专区 | 亚洲成av人片无码天堂下载 | 久久99精品久久久久久青青 | 国产日韩欧美一区二区 | 六月婷婷av | 一道本在线视频 | 伊人久久久 | 99国产精品白浆在线观看免费 | 777久久久精品一区二区三区 | 亚洲精品成人无码中文毛片 | 无码国产精品一区二区app | 椎名空在线观看 | 婷婷五月深深久久精品 | aⅴ一区二区三区无卡无码 午夜激情成人 | 国产精品一线二线 | 日韩精品视频在线免费观看 | 污污av| 日本19禁啪啪吃奶大尺度 | 日韩三级视频在线播放 | 国产精品久久久久久av福利 | 久久久美女视频 | 国产福利视频 | 8x8ⅹ国产精品8x红人影库 | 醉酒后少妇被疯狂内射视频 | 久久se精品一区二区 | 日韩成人久久 | 色呦呦在线 | 91蜜桃传媒精品久久久一区二区 | 精品国产乱码久久久久久影片 | 久久九九99| www国产成人免费观看视频,深夜成人网 | 忘忧草社区在线www 国产视频亚洲 | 国产女王调脚奴免费视频 | 久久久新 | 色网站在线播放 | 伊人22综合 | 理论片福利片 | 中文乱码在线中文字幕中文乱码 | 亚洲精品国产综合久久一线 | 99久久久国产精品免费牛牛 | 狠狠躁天天躁无码中文字幕图 | 91综合中文字幕乱偷在线 | 国产美女亚洲精品久久久99 | 羞羞色男人的天堂 | 中国丰满人妻videoshd | 2020精品国产福利在线观看香蕉 | 性做爰视频免费播放大全 | 国产精品线路一线路二 | jzjzjz亚洲丰满少妇 | 牲欲强的熟妇农村老妇女 | 最新亚洲中文av在线不卡 | 91国内精品久久 | 蜜桃av无码免费看永久 | 免费性网站 | 成年人色网站 | 日本3p视频 | 一区二区日韩欧美 | 亚洲欧美国产国产一区二区 | 伊人久久狼人 | 黄色毛片在线观看 | 中文字幕乱码人妻一区二区三区 | 国产美女av在线 | 免费无码麻豆av片在线观看 | 久久我不卡 | 在线观看精品视频网站 | 狠狠躁夜夜躁人人爽视频 | 免费又黄又裸乳的视频 | 免费国产拍久久受拍久久 | 天堂在线资源网 | 久久成年片色大黄全免费网站 | 色偷偷免费 | 亚洲天堂免费观看 | 国产91在线观 | 久久精品国产亚洲精品 | 黄色av网站免费 | 人人曰人人做人人 | 成年男人裸j照无遮挡无码 最新av在线播放 | 你懂的网址国产欧美 | 免费av毛片 | 视频一区 中文字幕 | 97在线播放免费观看 | 男人吃奶视频 | 69天堂人成无码免费视频 | 男女性爽大片视频 | 精品午夜熟女人妻视频毛片 | 久久九九久精品国产综合 | 狠狠色综合网站久久久久久久高清 | 性xxxxx大片做受免费视 | wwwyoujizz日本 | 少妇出轨精品中出一区二区 | 国产女同疯狂激烈互摸 | 麻豆传媒一区二区三区 | 国产视频在线观看网站 | 欧美整片在线观看 | 中文字幕在线播放第一页 | 午夜在线观看免费线无码视频 | 99久久夜色精品国产亚洲 | 性生交大片免费视频网站 | 乱码人妻一区二区三区 | 免费观看又色又爽又湿的软件 | 婷婷五月六月激情综合色中文字幕 | 国产对白在线 | 欧美三级在线电影免费 | 99re久久精品国产首页 | 国产精品美女久久久久图片 | 亚洲国产精品影院 | 亚洲娇小与黑人巨大交 | 亚洲国产精品自产在线播放 | 久久人人97超碰国产亚洲人 | 亚洲a成人无码网站在线 | 色一情一乱一乱一区91av | 87福利视频 | 国产精品骚 | 91精品国产综合久久久久久蜜臀 | 欧美一二三级 | 亚州国产精品 | 国产精品视频福利 | 一区二区视频网站 | 免费看小12萝裸体视频国产 | 国产精品视频a | 一级全黄色片 | 午夜福利国产成人无码gif动图 | 久久国产精品一国产精品 | 91黄在线观看 | 久久俺也去丁香综合色 | 国产成人无码一区二区在线播放 | 欧美影院成年免费版 | av播放在线| 91精品日产一二三区乱码 | 老汉色老汉首页a亚洲 | 狠狠色综合激情丁香五月 | 老熟妇乱子伦系列视频 | 色偷偷偷在线视频播放 | 另类小说婷婷 | 水中色av综合| 亚洲欧美成人a∨观看 | 99久久99久久免费精品蜜臀 | 一本免费视频 | 国产成人综合在线观看不卡 | 毛葺葺老太做受视频 | 中文毛片无遮挡高清免费 | 亚洲欧美一区在线 | 真人二十三式性视频(动) | 国产传媒资源网站 | 欧美色图亚洲色 | 欧美成人免费网站 | 男女交性全过程免费观看网站 | 曰的好深好爽免费视频网站 | 国产黄色一级片 | 女人被男人桶30分钟无遮挡动态图 | av免费观看网站 | 天天久久综合网 | 少妇无码一区二区二三区 | 插插射啊爱视频日a级 | 91亚洲国产成人精品性色 | 先锋影音亚洲 | 日韩大片免费观看视频播放 | 极品美女无套呻吟啪啪 | 亚洲国产精品第一区二区 | 法国啄木系列成人av | 粗大的内捧猛烈进出视频 | 欧美人与性动交zoz0z | 不卡久久 | av资源在线播放 | 婷婷伊人五月尤物 | 免费中文字幕日产乱码 | 91中文在线 | 米奇777四色精品人人爽 | 国内久久婷婷五月综合色 | 成人高清无遮挡免费视频在线观看 | 中文字幕亚洲制服在线看 | 亚洲在线| 国产成人免费9x9x人网站视频 | 深夜毛片 | 成年美女黄网站色大片免费看 | 久久亚 | 国产一区二区三区免费观看网站上 | 亚洲欧美高清在线精品一区二区 | 欧洲av在线播放 | 天堂www中文资源 | 香港三级日本三级妇三级 | 老外和中国女人毛片免费视频 | 夜夜爽日日柔柔日日人人 | 黄色网页免费在线观看 | 成年人天堂 | 四虎网站在线播放 | 欧洲性猛交 | 在线看网站 | 亚 洲 视 频 高 清 无 码 | 久久精国产 | 亚洲综合情 | 3d成人精品动漫视频在线观看 | 美女18禁一区二区三区视频 | 在线观看免费www | 久热青草 | 亚洲日韩国产二区无码 | 999国产精品视频免费 | 久久久久久久一区 | 国产成人精品免费看视频 | 国产自在自线午夜精品 | 国产黄a三级三级三级av在线看 | 中文字幕妇偷乱视频在线观 | 久久网伊人 | 成人动漫在线免费观看 | 色av网站| 激情网综合| 精品乱| 国产午夜精品18久久蜜臀董小宛 | 欧美精品国产综合久久 | 日韩中文字幕网站 | 久久久精品99| 免费国产污网站在线观看不要卡 | 国产精品夜夜春夜夜爽久久 | 免费高清毛片 | 韩国午夜理伦三级2020苹果 | a√天堂网| 天堂а√在线中文在线 | 国产极品久久久久久久久 | 51av在线 | 日韩av第一页 | 日本少妇xxx做受 | xxx国产精品午xxx | 日韩av线| www.国产| 菠萝菠萝蜜午夜视频在线播放观看 | 亚洲男人的天堂在线va | 国产传媒懂得 | 欧美色综合天天久久综合精品 | 久久精品成人免费观看 | 四虎永久在线精品免费观看视频 | 夜夜爽爽爽久久久久久魔女 | 欧美精品一区二区久久 | 亚洲国产成人欧美激情 | 久久精品国产亚洲5555 | 国语自产拍91在线a拍拍 | 天天看a | 我把护士日出水了视频90分钟 | 强行征服邻居人妻淑敏 | 日本乱子伦一区二区三区 | 中文字幕人妻被公上司喝醉506 | 日韩极品一区 | 区二区欧美性插b在线视频网站 | 视频区图片区小说区 | 久久人人添人人爽添人人88v | 狠狠色综合久久婷婷色天使 | 在线视频导航 | 久久精品女人天堂av麻 | 日韩人妻一区二区三区免费 | 久久看视频 | 久久青草精品欧美日韩精品 | 亚洲精品无码久久久久av麻豆 | 2020久久香蕉国产线看观看 | 久久人人人 | 男人j进入女人j内部免费网站 | 久久久久久国产精品免费播放 | 久久久久久夜精品精品免费啦 | 超碰在线亚洲 | 疯狂做受xxxx高潮不断 | 无码少妇一区二区三区 | 欧美极品一区二区三区 | 乳女教师の诱惑julia | 青青青草网站免费视频在线观看 | 亚洲综合另类小说色区大陆 | 亚洲色图13p| 亚洲女人色综合小说 | 美女赤身免费网站 | 明星各种姿势顶弄呻吟h | www.av日韩| 国产亚洲精品久久一区二区三区 | 肉欲性大交毛片 | 色婷婷av一区二区三区之一色屋 | 野外亲子乱子伦视频丶 | 欧美乱码精品一区 | 亚洲人成77777在线播放网站不卡 | 手机成人在线 | 国产成人影视 | 欧产日产国产精品视频 | 少妇太爽了在线观看免费 | 黄色麻豆视频 | 午夜视频久久 | 国内精品一线二线三线黄 | 香蕉久久夜色精品国产更新时间 | 18禁黄网站禁片免费观看不卡 | 日本中文字幕在线视频二区 | 国产china男男激情 | 五月激情婷婷丁香综合基地 | 国产成人免费av一区二区午夜 | 三级全黄裸体 | 免费a级大片 | 九九九九免费视频 | 大尺度av | 呦男呦女视频精品八区 | 午夜dj高清免费观看视频 | 国产ts在线播放 | 日韩精品亚洲人旧成在线 | 国产自偷亚洲精品页65页 | 丰满岳乱妇一区二区三区 | 鲁丝久久久精品av论理电影网 | 色一乱一伦一图一区二区精品 | 色片在线免费观看 | 摸摸大奶子 | 国产一区二区三区精品在线观看 | 一区二区三区无码视频免费福利 | 一 级做人爱全视频在线看 天天天天天天操 | 91制服诱惑 | 青娱乐国产精品 | 成人片黄网站a毛片免费观看 | 成色视频 | 国产女主播视频一区二区三区 | 成人网色| 最新系列国产专区|亚洲国产 | 亚洲男女一区二区三区 | 欧美日韩国产成人在线观看 | 色香蕉在线视频 | 日韩精品免费一区二区夜夜嗨 | 欧美乱强伦 | 毛片视频免费 | 午夜一区一品日本 | 欧美精品乱码99久久影院 | 五月婷婷网站 | 天天躁夜夜躁狠狠综合2020 | 黄频视频在线观看 | 亚洲成a人v电影在线观看 | 国产精品卡一卡二 | 欧美成人一二区 | 国产精品久久久久9999高清 | 久久青青草原一区二区 | 狠狠色丁香婷婷综合久久图片 | 国产一区二区三区四区五区vm | 久久亚洲a | 中文字字幕在线中文乱 | 成人av一区二区兰花在线播放 | 人妻大战黑人白浆狂泄 | 7777奇米影视 | 亚洲国产精品999久久久婷婷 | 日韩超碰| 99久久国产自偷自偷免费一区 | 日本特黄视频 | 亚洲综合色区在线观看 | 日韩精品色| 国产精品爽爽爽爽爽爽在线观看 | 善良的公与媳hd中文字 | 日本性猛交| 国产精品18久久久久白浆软件 | 亚洲色图欧美 | 中文字幕在线观看视频地址二 | 亲子伦一区二区三区观看方式 | 国产femdom调教557 | 泰国性xxxx极品高清hd | 麻豆精品影院 | 日本理伦少妇4做爰 | 国产精品污www在线观看17c | 天天射天天拍 | 五月天婷婷综合 | 美女啪啪网址 | 一区二区三区久久含羞草 | 伊人久久大香线蕉av不卡 | 日本丰满护士爆乳xxxx | 精品66| xxxwww在线观看 | 精品在线观看免费 | 奇米四色777 | 中国凸偷窥xxxx自由视频 | 国产乱淫av片免费看 | 懂色av噜噜一区二区三区av88 | 国产情侣一区二区 | 边啃奶头边躁狠狠躁3p | 精品国产自在精品国产精华天 | 噜噜视频 | 小12箩利洗澡无码视频网站 | 国产精品毛片一区二区在线看舒淇 | 初尝黑人嗷嗷叫中文字幕 | 黄色小视频免费看 | 久草久草 | 国产内射在线激情一区 | 一区国产传媒国产精品 | 日本嫩交12一16xxx视频 | 99免费在线观看 | www色人阁 | 国产丝袜美腿一区二区三区 | 亚洲天堂免费在线观看视频 | 成人精品自拍 | 国产一极片 | 2021精品国产自在现线 | 久久久亚洲欧洲日产国码二区 | 911久久| 丰满人妻翻云覆雨呻吟视频 | www.国产在线 | 久久综合伊人77777麻豆 | 日韩欧洲在线高清一区 | 热久久这里只有精品 | 狠狠综合久久久久综合网小蛇 | 国产精品青草久久久久婷婷 | 天天躁夜夜躁狠狠眼泪 | 国产乱码卡二卡三卡4 | 欧美在线视频免费 | 女人舌吻男人茎视频 | 猫咪av成人永久网站在线观看 | 欧美 亚洲 另类 丝袜 自拍 动漫 | 亚洲精品乱码久久久久久日本 | 日本中文字幕在线 | 日本打白嫩屁股视频 | 亚洲国产精品特色大片观看完整版 | 日本三级带日本三级带66 | 视频在线不卡 | 国精品一区二区 | youjizz在线视频 | 中文字幕精品久久久久人妻红杏ⅰ | 精品久久久爽爽久久男人和男人 | 国产精品女人特黄av片 | 黄色av大全 | 亚洲国产97在线精品一区 | 吃奶摸下激烈视频学生软件 | 国内精品国产成人国产三级粉色 | 五月婷婷俺也去 | 波多野结av在线无码中文免费 | 神马午夜国产 | 日躁夜躁狠狠躁2020 | 日日碰狠狠添天天爽无码 | 99久久免费看精品国产 | 在线永久看片免费的视频 | 日日日操| 色综合久久一区二区三区 | 久久久国产亚洲精品 | 国产剧情av引诱维修工 | 中文字幕91| 一级片麻豆 | 7788色淫视频观看日本人 | av在线免费不卡 | 亚洲人成电影网站色迅雷 | 成人免费无码精品国产电影 | 美女啪啪网 | 欧美视频一二区 | 成人自拍视频网站 | 特级欧美插插插插插bbbbb | 尤物视频免费在线观看 | 亚洲影视精品 | 在线精品亚洲观看不卡欧 | 亚洲一二三区视频 | 成人精品在线观看 | 亚洲国产欧美日韩 | 亚洲精品美女久久7777777 | 成人区人妻精品一区二区不卡 | 在线观看成人网 | 中文字幕在线免费 | 日韩免费在线视频观看 | 日韩成人综合 | 大尺度舌吻呻吟声 | a级毛片在线免费 | 亚洲一区小说 | 摸摸摸bbb毛毛毛片 免费成人黄 | 精品人妻无码专区在线无广告视频 | 亚洲精品av无码喷奶水糖心 | 手机看片一区 | 国产精品爆乳在线播放第一人称 | 天天摸天天看天天做天天爽 | 欧美午夜精品一区二区三区 | 色婷婷在线影院 | 草逼免费视频 | 97久久精品午夜一区二区 | 精品伊人久久久大香线蕉天堂 | 日狠狠| 免费无码精品黄av电影 | 天堂在线.www天堂在线资源 | 日韩欧美激情兽交 | 亚洲高清免费 | 日韩字幕在线观看 | 欧美日韩视频在线观看免费 | 自拍偷拍五月天 | 三级免费网站 | 在线精品免费视频 | 中文有码亚洲制服av片 | 综合色视频 | 亚洲 自拍 色综合图 12p | 男人天堂a在线 | 国产99久久亚洲综合精品 | 亚洲免费视频在线观看 | 91噜噜噜| 色欲久久久中文字幕综合网 | 免费无码h肉动漫在线观看 色婷婷伊人 | 无码人妻丰满熟妇a片护士 亚洲国产精品久久久久久久久久 | 欧亚激情偷乱人伦小说专区 | 亚洲国产欧美日韩在线精品一区 | 久久国产视频一区 | 欧美极品色午夜在线视频 | www.youjizz国产 | 99久久99视频只有精品 | 婷婷综合av | 久久99精品久久久大学生 | 天干夜啦天干天干国产免费 | 国产国产人免费人成免费视频 | 精品亚洲一区二区三区在线播放 | 日日噜噜夜夜狠狠久久丁香五月 | 久久播我不卡 | 黑人巨大亚洲一区二区久 | 午夜影院免费在线观看 | av潮喷大喷水系列无码 | 成人黄网站高清免费视频 | 色婷婷国产精品高潮呻吟av久久 | 午夜在线国语中文字幕视频 | 国产精品欧美大片 | 天天天操天天天干 | 麻豆精品一区二区三区 | 国产做爰视频免费播放 | 欧美激情一区二区三区成人 | 2022国产成人精品视频人 | 丰满白嫩尤物一区二区 | 一本久道久久综合婷婷五月 | 丰满少妇猛烈进入三区视频 | 国偷自产av一区二区三区 | 丰满少妇呻吟高潮经历 | 嫩草在线视频 | 成人av一本不卡二卡 | 99久久久久久| 国产福利合集 | 日韩国产欧美一区 | 欧美老熟妇乱子 | 亚洲欧洲日产国码在线 | 国产精品国产av国产三级 | 屁屁影院一区二区三区 | 国产亚洲精品久久久久久大师 | 国产久久精品 | 一边摸一边抽搐一进一出口述 | 伊人影音| 国产成人精品视频国产 | 中文字幕在线观看英文怎么写 | 337p日本欧洲亚洲大胆艺术图 | 狠狠干在线观看 | 国产美女视频一区 | 国产无遮挡又黄又爽免费视频 | 亚洲乱视频 | 欧美性区 | 波多野42部无码喷潮 | asian日本若图pics | www.黄色网址.com | 激情文学小说区另类小说同性 | 精品国产一区二区三区日日嗨 | 精品欧美成人高清在线观看 | 午夜视频在线观看视频 | 乳女教师の诱惑juliamagnet | jizzzz成熟丰满韩国女视频 | 欧美成人午夜在线观看视频 | 毛片无遮挡高清免费 | 老熟女重囗味hdxx70星空 | 欧美黄色小说 | 亚洲色拍拍噜噜噜最新网站 | 国产精品免费视频二三区 | 精品福利一区二区三区 | 怡红院av亚洲一区二区三区h | 久久综合国产乱子伦精品免费 | 狠狠躁天天躁夜夜添人人 | 久久不见久久见www日本网 | 国产全肉乱妇杂乱视频1 | 青青久久av北条麻妃海外网 | 一区二区三区久久久 | 久久国产精品人妻丝袜 | 人妻系列无码一区二区三区 | 国产丝袜美女精品av | 一级黄色美女视频 | 色翁荡息又大又硬又粗视频 | 91av在线视频观看 | 丰满少妇被粗大猛烈进人高清 | 日韩在线视频网址 | 久草福利资源 | 国产一区在线视频观看 | 一曲二曲三曲在线观看中文字幕动漫 | 亚洲同性猛男毛片 | 亚洲国产成人手机在线电影 | 国产精品呻吟久久av凹凸 | 天天夜夜草 | 亚洲免费网 | 国产丰满大乳奶水 | 欧美一区二区激情视频 | 久久午夜电影网 | 尤物精品视频在线观看 | 久久精品国产一区二区电影 | 国产精品美女久久久久久丫 | 樱桃国产成人精品视频 | 白嫩少妇xxxxx性hd美图 | av大片在线无码永久免费 | 成年美女黄网站色大片免费看 | 奇米影视777在线观看 | 国产片免费福利片永久 | 日本视频免费在线 | 成人看片网站 | 天堂在线精品视频 | 狠狠色依依成人婷婷九月 | 午夜婷婷国产麻豆精品 | 操小妹影院 | 中文字幕乱码中文乱码51精品 | 双腿张开被9个黑人调教影片 | 丰满少妇xoxoxo视频 | 成年网站未满十八禁视频天堂 | 国产影音先锋 | 无码午夜成人1000部免费视频 | 欧美日韩1 | 亚洲国产精品丝袜国产自在线 | 久色国产 | 久久亚洲高潮流白浆av软件 | 男女啪啪永久免费网站 | 亚洲综合区图片小说区 | 性插动态视频 | 欧洲亚洲色一区二区色99 | 欧美日韩一区二区三区视频 | 在线中文字幕亚洲 | 亚洲人成电影免费观看在线看 | 中文在线天堂资源 | 伊人热热 | 夜鲁鲁鲁夜夜综合视频欧美 | 亚洲一区二区三区麻豆 | 四虎精品在线播放 | aaa黄色片 | 国产午夜视频在线 | 麻豆精品国产熟妇aⅴ一区 国产精品99久久久精品无码 | 日韩久久久久 | 女人18毛片一区二区三区 | 不卡的av片| 国产成人免费高清激情视频 | 超薄肉色丝袜一二三 | 日韩成人无码毛片一区二区 | 极品女神无套呻吟啪啪 | 久久国产精品波多野结衣 | 国产精品色情国产三级在 | 欧产日产国产精品乱噜噜 | 粗大猛烈进出高潮视频大全 | 国产69精品久久久久久 | 亚洲精品无码久久 | 亚洲欭美日韩颜射在线二 | 午夜精品久久 | 黄色激情小说网站 | 狠狠色成人综合 | 亚洲精品屋v一区二区 | 久久久久久一级 | 少妇被黑人4p到惨叫在线观看 | 嫩草研究院久久久精品 | 亚洲国产成人综合 | 亚洲精品乱码久久久久久日本蜜臀 | 国产成人精品免高潮在线观看 | 国产精品美女久久久久aⅴ国产馆 | 丰满多毛的大隂户毛茸茸 | 噼里啪啦国语影视 | 少女高清影视在线观看动漫 | 国产91综合一区在线观看 | 亚洲国产精品无码成人片久久 | 亚洲高清精品视频 | 久草综合在线视频 | 色婷婷亚洲一区二区综合 | 99国产超薄丝袜足j在线播放 | 999久久久精品国产消防器材 | 日欧美女人 | 久久999精品国产只有精品 | 97视频入口 | 亚洲精品无码成人a片在 | 伊人久久大香线蕉精品 | 亚洲女人天堂成人av在线 | 精品黑人一区二区三区 | 又大又硬又爽免费视频 | 国产亚洲精品久久77777 | 欧美老肥妇做爰bbww | 52avaⅴ我爱haose免费视频 | 青草视频污 | 久久精品视频网 | 国产又色又爽又黄的视频在线 | 在线黄色毛片 | 色综合久久久久久久久五月 | 国产性xxxx18免费观看视频 | 亚洲精品视频一二三区 | 亚洲 欧美 综合 另类 中字 | 美女张开腿让男人桶爽 | 麻豆md0077饥渴少妇 | 成人综合婷婷国产精品久久 | 久久久久青草线焦综合 | 99久热re在线精品视频 | 女人扒开腿让男人桶到爽 | 欧美亚洲日本国产综合在线 | 激情婷婷六月天 | 全黄激性性视频 | 亚洲无人区码一码二码三码的含义 | 99精品产国品一二三产区 | 亚州av| 91久久国产综合久久91精品网站 | 人妻无码一区二区三区欧美熟妇 | 国产成人18黄网站免费观看 | 国产激情视频在线观看的 | 久久久久青草大香综合精品 | 看成年女人午夜毛片免费 | 男女同房做爰爽免费 | 91私密视频 | 久久久999 | 国产萌白酱喷水视频在线播放 | 国产3级在线| 男女啪啦啦超猛烈动态图 | 国产综合无码一区二区辣椒 | 亚洲精品乱码久久久久v最新版 | 激情综合激情 | 国产网站免费在线观看 | 久久中文字幕亚洲精品最新 | 欧美亚洲色倩在线观看 | 国产精品亚洲综合久久系列 | 狠狠综合网 | 国内毛片精品av一二三 | 欧美喷潮久久久xxxxx | 国产九九久久99精品影院 | 亚洲偷偷自拍高清 | 日本免费黄色 | 久久婷婷五月综合色区 | 四虎在线免费视频 | 久久久精品456亚洲影院 | 日本三级久久 | 不卡一卡二卡三乱码免费网站 | 欧美成人免费一级人片100 | www日韩高清 | 午夜性刺激在线观看 | wwww日本60 | 97夜色 | 波多野结衣视频观看 | 欧美三日本三级少妇三99r | 天天狠天天透天干天天 | 免费黄网站在线看 | 国产小精品 | 国产黄免费 | 污污污污污污www网站免费 | 久久这里有精品国产电影网 | 最新国产aⅴ精品无码 | 国产综合亚洲精品一区二 | 亚洲19禁大尺度做爰无遮挡 | 国产传媒懂得 | 欧美熟妇丰满肥白大屁股免费视频 | 18禁真人抽搐一进一出动态图 | 国产香蕉在线视频 | 人妻熟女欲求不满在线 | 马与人黄色毛片一部免费视频 | 亚洲国产成人综合在线观看 | 人人添人人妻人人爽夜欢视av | 邻居少妇张开腿让我爽了一夜 | 亚洲欧美网址 | 激情五月中文字幕 | 乱色欧美videos黑人69 | 一级特级毛片 | 亚洲欧美在线视频观看 | 欧美久久久久久久久久久 | 国产精品久久免费观看spa | 一级黄色a级片 | 国产99视频精品免费观看9 | 亚洲高清国产拍精品动图 | 中文字幕人妻被公上司喝醉 | 国产精品视频在线观看 | 国内精品久久久久精免费 | 玖玖玖精品 | 成人久久视频 | 友田真希中文字幕在线视频中 | 少妇之白洁番外篇 | 欧美一区二区三区视频 | 国产毛片毛片毛片毛片毛片毛片 | 亚洲乱码日产精品bd在观看 | 亚洲一区二区三区成人网站 | 亚洲女人的天堂www 国产香线蕉手机视频在线观看 | 亚洲熟妇真实自拍另类 | 67194熟妇在线永久免费观看 | 丝袜高跟麻麻浓精受孕人妻 | 日韩av免费无码一区二区三区 | 国产女高清在线看免费观看 | 男男成人高潮片免费网站 | 视频在线a | 日日摸夜夜添夜夜添毛片av | 日本成熟少妇激情视频免费看 | 免费国产在线精品一区二区三区 | 韩国午夜福利片在线观看 | 女高中生自慰污污网站 | 亚洲国产成人精品女 | 欧美日韩免费在线视频 | 国产精品美女在线观看 | 色老大久久综合网天天 | brazzers欧美大波霸 | 大伊香蕉精品一区视频在线 | 女主和前任各种做高h | 久久精品无码一区二区三区免费 | 国产无遮挡免费 | 人成福利视频在线观看 | 性男女做视频观看网站 | 久久久久久久久久久国产精品 | 亚洲第一色网 | 亚洲一区免费在线观看 | 亚洲av禁18成人毛片一级在线 | 大尺度分娩网站在线观看 | 欧美日韩国产在线 | 亚洲免费精品视频 | 国产精品视频永久免费播放 | 免费三级网址 | 亚洲视频在线看 | 亚洲欧洲日产喷水无码 | 国产成人啪精品视频免费网站软件 | 亚洲视频在线免费看 | 国产国拍精品av在线观看按摩 | 中国美女黄色一级片 | 黄色大毛片 | yp在线观看视频网址入口 | 免费一淫片6级 | 成人一区二区在线 | 一级特黄性色生活片 | 精品人妻无码区二区三区 | 日韩精品免费看 | 天堂а√在线地址中文在线 | 日韩欧美在线观看免费 | 99久久影院| 99ee6这里只有精品热 | 爱爱网站视频 | 国产精品老牛影院99av | 国产精品a久久 | 欧美激情图 | 四虎永久在线精品免费无码 | 亚洲九九爱 | 免费成人小视频 | 国产在线久| 久久精品福利视频 | 亚洲乱码一区二区三区三上悠亚 | 在线日韩视频 | 亚洲国产成人无码av在线播放 | 久久人人爽人人爽人人片ⅴ | 大肉大捧一进一出好爽视色大师 | 伊人久久综合精品无码av专区 | 亚洲一二三四五 | 成年日韩片av在线网站 | 国产男女无遮挡猛进猛出 | 综合亚洲伊人午夜网 | 日韩欧美在线观看免费 | 99热都是精品久久久久久 | 日本一本久 | 亚洲欧洲日产国码在线 | 一区免费在线 | 国产精品刺激对白麻豆99 | 日本夫妻性生活视频 | 一级欧美一级日韩片免费观看 | 日韩福利视频导航 | 最近中文字幕mv在线视频2018 | 色综合久久88色综合天天提莫 | 国产剧情国产精品一区 | 国产初高中生粉嫩无套第一次 | 秋霞特色aa大片 | 三级a做爰一女二男 | 国内精品久久久久久久影院 | 亚洲在线天堂 | 久久亚洲精品无码aⅴ大香 欧美日韩国产成人 | 91精品国产乱码久久久久久久久 | 免费无码不卡中文字幕在线 | 日韩高清网站 | 国产在线播放91 | 97无码免费人妻超级碰碰碰 | av黄在线 | 国产精品99久久久久的智能播放 | 日本一卡2卡三卡4卡免费网站 | 日韩欧美中文字幕精品 | 天堂在线最新版资源www中文 | 午夜免费 | 在线观看免费人成视频 | 玖玖色在线 | 毛片h| 天天摸天天碰天天添 | 国产视频高清 | 一本一本久久a久久精品综合麻豆 | 日干夜操 | 国产在线不卡视频 | 日本在线一区二区三区 | 午夜福利yw在线观看2020 | 日日摸夜夜添夜夜无码区 | www.毛片com| 99国产精品无码专区 | 日韩乱码人妻无码中文字幕久久 | 成人黄色激情 | 日本五月天婷久久网站 | 国产成人啪精品视频网站午夜 | 日韩中文人妻无码不卡 | 97久久久久人妻精品区一 | gav成人网免费免播放器播放 | 成人xxx | 91免费看片 | 久久伊人色av天堂九九 | 密桃av在线| 骚动漫十八禁在线观看 | 一区二区三区高清视频3 | 无码少妇高潮浪潮av久久 | 最新国产精品久久精品 | 大肉大捧一进一出好爽视频mba | 五月天综合社区 | 国产清纯白嫩初高生在线观看 | 成人亚洲一区二区三区在线 | 国产高清一国产av | 国产精品99蜜臀久久不卡二区 | 精品国产乱码久久久久久蜜退臀 | 黑人中文字幕一区二区三区 | 337p日本欧洲亚洲大胆精品 | 日韩在线三区 | 成人欧美亚洲 | 亚洲欧洲日产国码av老年人 | www.亚洲色图.com | 亚洲男同playgv片在线观看 | 日韩在线视频免费播放 | 午夜精品久久久久久久久久久久久 | 国产精品卡一卡二卡三 | www.黄色av | 自拍视频一区二区三区 | 成人国产精品色哟哟 | 色噜噜狠狠一区二区 | 亚洲黄色小视频在线观看 | 在线天堂√8 | 人人妻人人澡人人爽国产一区 | 日韩性生活视频 | 国精产品一线二线三线av | 色站综合 | 69人人 | 中文字幕妇偷乱视频在线观 | 91成人看片免费版 | 丝袜视频在线观看 | 337p亚洲精品色噜噜狠狠 | 欧美熟妇乱子伦xx视频 | 另类激情综合 | aa黄色片 | 国产熟睡乱子伦视频观看软件 | 天堂在线精品视频 | 骚动漫十八禁在线观看 | 亚洲狠狠婷婷综合久久久久图片 | 亚洲另类视频 | 久久99蜜桃综合影院免费观看 | 亚洲男人的天堂在线aⅴ视频 | 国产在线观看禁18 | 亚洲精品91天天久久人人 | 欧美性猛交xxxⅹ乱大交小说 | 亚洲色图偷窥自拍 | 久天啪天天久久99久孕妇 | 国产亚洲精品视觉盛宴 | 加勒比久久综合网天天 | 少妇搡bbbb爽毛片无 | 一区二区三区免费视频播放器 | 中文字幕在线精品视频入口一区 | 蜜桃视频成人在线观看 | 亚洲区精品 | 偷拍一区二区三区在线婷婷 | 国产目拍亚洲精品二区 | 五月天婷婷视频 | 精品性高朝久久久久久久 | 爽爽午夜影视窝窝看片 | 欧美日本韩国一区二区三区 | 亚洲第七页 | 亚洲第一无码专区天堂 | 亚洲精品入口一区二区乱 | 在线播放亚洲人成电影 | 激情毛片视频 | 日韩精品免费一区二区在线观看 | av永久天堂一区 | 亚州精品av久久久久久久影院 | 黄色免费视频在线 | www国产国人免费观看视频 | 777米奇色狠狠俺去啦奇米77 | 无毛av | 图片区小说区亚洲欧美自拍 | 天堂另类网站 | 丰满大乳国产精品 | 京香julia在线观看 | 91青青视频 | 国产一精品一av一免费 | 国产激情久久久久影院小草 | 免费va人成视频网站全 | 亲子乱一区二区三区 | 亚洲三级在线中文字幕 | 黑人vs日本人ⅹxxxhd | 国产经典一区二区三区蜜芽 | 久久99久久99精品蜜柚传媒 | 女主和前任各种做高h | 国产清纯白嫩初高生视频在线观看 | 老司机激情影院 | 国产网站精品 | 午夜插插| 精品无码一区在线观看 | 捆绑白丝粉色jk震动捧喷白浆 | 日本高清一区二区三 | 激情视频免费在线观看 | 乱肉放荡艳妇视频6399 | 午夜福利电影网站鲁片大全 | 风韵犹存少妇69xx视频 | 欧美亚洲黄色片 | 国产成人精品福利一区二区 | 51福利视频 | 少妇看片| 日日日日日日 | 黄频网站在线观看 | 亚欧精品在线 | 国产精品午睡沙发系列 | 啪啪网免费 | 亚洲精品久久中文字幕 | 国产一级免费看 | 日韩最新网址 | 久久精品视频网站 | 日韩午夜网站 | 人人揉揉揉香蕉大免费 | 一区二区高清视频在线观看 | 五月天久草| 亚洲春色成人 | 2021国产精品一卡2卡三卡4卡 | 日韩欧美中文字幕在线视频 | 久久鬼色综合88久久 | 国产福利av | 免费看的av网站 | 亚洲精品美女在线观看 | 欧美黄色a | 妖精视频一区 | 久久久久爽爽爽爽一区老女人 | 99久久国产露脸国语对白 | 国产女人与拘做视频免费 | 久久成人欧美 | 中文字幕成人精品久久不卡 | 亚洲欧美日韩自偷自拍 | 成人免费毛片xxx | 国内少妇偷人精品免费 | 一区二区在线免费观看视频 | 国产精品久久久久久中文字 | 国语自产拍无码精品视频在线 | 国产欧美日韩亚洲一二三区 | 日本强好片久久久久久aaa | 毛片.com| 老熟女一区二区免费 | 青青草国产精品亚洲 | 2021国产精品自在自线 | 91精品国产综合久久久久久软件 | 日韩av片无码一区二区不卡电影 | 无码av最新高清无码专区 | 伊人久久大香线蕉综合网 | 亚洲国产精品18久久久久久 | 欧美一级特黄aaaaaaa什 | 最新亚洲中文av在线不卡 | 日本一卡2卡3卡四卡精品网站 | 国产无遮挡又黄又爽在线观看 | xxxwww国产| 欧美三日本三级少妇三级99观看视频 | 99精品国产兔费观看久久 | www欧美在线观看 | 欧美日韩国产在线一区 | 人妻少妇久久久久久97人妻 | 亚洲国产精品成人天堂 | 99蜜桃臀久久久欧美精品网站 | 亚洲欧美又粗又长久久久 | 日本久久一区二区 | 五月天一区二区 | 天堂网av手机版 | 久草黄色网 | 中国丰满少妇人妻xxx性董鑫洁 | 国产成人亚洲综合无码99 | 亚洲国产精品无码专区成人 | 五月婷婷色丁香 | 天天夜夜啦啦啦 | 亚洲www天堂com | 欧洲欧美人成视频在线 | 在线黑人抽搐潮喷 | 无码视频在线观看 | 国内精品国内自产视频 | 无码国产69精品久久久久孕妇 | 中文字幕日韩视频 | 日韩大片免费观看视频播放 | 国产 日韩 欧美 中文 在线播放 | 四虎影视久久久免费观看 | 中国国产野外1级毛片视频 一区久久久 | 人妻熟女斩五十路0930 | 精品国精品国产自在久不卡 | 2019日韩中文字幕 | 男人的天堂网av | 精品麻豆一卡2卡三卡4卡乱码 | www.日韩系列 | 屁股夹体温计调教play | 国产成人无码区免费内射一片色欲 | 亚洲国产成人在线观看 | 国产成人精选在线观看不卡 | www.xxxx欧美 | 岛国三级在线观看 | 国产精品女人精品久久久天天 | 国产激情内射在线影院 | 91丨九色丨蝌蚪丨丝袜 | 秋霞av无码观看一区二区三区 | 国内精品一区二区三区不卡 | 午夜插插插 | 99热亚洲色精品国产88 | 日本乱码伦午夜福利在线 | 91亚洲精品久久久 | www99视频| 黄频在线播放 | 色婷婷在线观看视频 | 色88久久久久高潮综合影院 | 亚洲一区二区久久久 | 妇挑战三黑人4p日本中文字幕 | 人人爽人人爽人人爽人人片av | 妖精视频一区二区 | 国产精品久久欧美久久一区 | 日韩中文字幕视频在线观看 | 欧美成人黑人猛交 | 无码精品国产dvd在线观看久9 | 日韩综合色 | 久久亚洲精品国产亚洲老地址 | 日韩黄色片免费看 | 久久99久久99精品免视看 | 欧美人善z0zo性伦交高清 | 激情视频网址 | 韩漫动漫免费大全在线观看 | 永久毛片全免费福利网站 | 中日韩精品无码一区二区三区 | 亚洲国产欧美在线综合 | 一本大道一区二区 | 色一情一乱一伦麻豆 | 亚洲乱码尤物193yw最新网站 | 涩涩涩综合 | 成人毛片在线播放 | 天天草天天摸 | 午夜a爱| 可以直接在线观看的av | 免费人成网站视频在线观看国内 | 国产久一 | 成人av番号网 | 国产涩涩 | 欲色影视天天一区二区三区色香欲 | 九九久久精品国产免费看小说 | 乱码一区二区三区四区 | 国产午夜鲁丝片av无码 | 久久综合给合久久狠狠狠97色 | 精品无码人妻av受辱日韩 | 超碰干| 国产免费人成视频在线观看 | 日韩中文字幕免费视频 | 精品国产福利久久久 | av一片 | 国产主播福利 | 人人超人人超碰超国产97超碰 | 少妇aaaa | 青青久在线视频免费观看 | 国产精品久久久久久久久福交 | 草1024榴社区成人 | 成年免费视频黄网站在线观看 | 无码高潮少妇多水多毛 | 亚洲欧洲中文日韩久久av乱码 | 国产午夜精品无码理论片 | 张柏芝亚洲一区二区三区 | 国产91网址| 亚洲 欧美 综合 另类 中字 | 精品无码av不卡一区二区三区 | 欧美顶级丰满另类xxx | 成人无码专区免费播放三区 | 欧美乱强伦 | 国产精品毛片一区二区 | 99热这里只有精品在线观看 | 国产网站大全 | 在线观看国产福利 | 羞羞视频在线观看 | 久久伊人少妇熟女大香线蕉 | 久久夜靖品2区 | 亚洲精品乱码久久久久久写真 | 色欲欲www成人网站 人妻体内射精一区二区 | 三八激情网| 大黄毛片| 欧美日本中文字幕 | 少妇mm被擦出白浆液视频 | 中文字幕在线观看亚洲视频 | 女色琪琪窝窝777777换脸 | 人与狗精品aa毛片 | 亚洲欧美在线综合图区 | 偷拍一女多男做爰免费视频 | 在线观看日本www | 成人做爰www看视频软件 | 国产999精品2卡3卡4卡 | 亚洲男人的天堂在线va | 日本午夜无人区毛片私人影院 | 欧美人与动牲交a欧美 | 久久久免费精品 | 国产蜜臀97一区二区三区 | 嫩草影院在线观看视频 | 精品亚洲欧美视频在线观看 | 日本精品αv中文字幕 | 国产精品亚洲а∨天堂 | 国产福利免费在线观看 | 亚洲日韩va无码中文字幕 | 十六以下岁女子毛片免费 | 九色精品国产成人综合网站 | 国产精品一卡二卡三卡四卡 | 一级做a爰全过程免费视频毛片 | 国产精品福利小视频 | 中文字幕在线字幕中文 | 男女做爰猛烈啪啪吃奶动床戏麻豆 | 丝袜老师高潮呻吟高潮 | 国产午夜福利精品久久不卡 | 99热99在线 | 美女网站免费观看视频 | 国产欧美日韩另类 | 三级毛片网 | 国产va精品午夜福利视频 | 国产h视频在线观看 | 成年女人男人免费视频播放 | 一区二区乱子伦在线播放 | 亚洲精品美女 | 国产精品美女久久 | 无码成人一区二区三区 | 欧美国产一二三区 | 国产日产欧产精品精品app | 超碰女 | www.youjizz.com中国| 狂野欧美性猛交xxxxx视频 | 少妇人妻大乳在线视频不卡 | 天天躁日日摸久久久精品 | 无码成人精品区在线观看 | 亚洲专区av | 国产免费人成在线视频 | 国产一区二区色 | 亚洲欧洲一二三区 | 日本久久精品少妇高潮日出水 | 亚洲 自拍 色综合图区一 | 黑人糟蹋人妻hd中文字幕 | 丰满少妇高潮久久三区 | 亚洲区和欧洲区一二三四 | 人妖天堂狠狠ts人妖天堂狠狠 | 国产真实夫妇交换视频 | 色婷婷久久久swag精品 | 日本一区二区不卡视频 | 强被迫伦姧高潮无码bd电影 | 成人av久久一区二区三区 | 久久偷看各类wc女厕嘘嘘 | 国产精品suv一区二区69 | 国产精品亚洲精品日韩已满 | 亚洲乱码在线卡一卡二卡新区豆瓣 | 有夫之妇3高潮中文字幕 | 曰韩精品一区二区 | 亚洲精品av中文字幕在线 | 黄色网av | 香蕉av久久一区二区三区 | 黑人vs日本人ⅹxxxhd | 狠狠干av | 18禁超污无遮挡无码免费游戏 | 久久丝袜脚交足免费播放导航 | 久久久一本精品99久久k精品66 | 人妻av无码一区二区三区 | 国产精品偷伦视频免费还看旳 | 成人黄色在线观看 | 精品久久久久成人码免费动漫 | 在线免费日本 | 欧美日本韩国一区二区三区 | 色视频观看 | 国产永久视频 | 先锋影音资源2中文字幕 | 男女羞羞无遮掩视频免费网站 | 精品国色天香一卡2卡3卡 | 久久国产a | 亚洲中文字幕一区精品自拍 | 成人三级视频 | 国产福利日本一区二区三区 | 波多野结衣大战黑人8k经典 | 动漫无遮挡h纯肉亚洲资源大片 | 中文字幕h | 亚洲精品乱码久久 | 午夜影院日本 | 青草伊人久久综在合线亚洲 | 欧美另类高清zo欧美 | 国产综合亚洲区在线观看 | 91禁在线观看 | 一色屋精品视频在线观看免费 | 午夜美女国产毛片福利视频 | 国产精品国产三级国产a | 欧美成人天堂 | 亚洲综合欧美在线… | 日韩视频 中文字幕 | 成年美女黄网站色大免费视频 | 国产精品免费_区二区三区观看 | 视频一区 视频二区 视频三区 视频四区 国产 | 久久精品人妻无码一区二区三区v | 国产91会所女技师在线观 | 欧美又粗又深又猛又爽啪啪九色 | 欧美老人巨大xxxx做受视频 |

 產品詳情尺寸說明性能參數資料下載
產品詳情尺寸說明性能參數資料下載產品概述
B2C-750混合伺服驅動器是最新研制的全數字式混合伺服驅動器,采用先進的超前角及矢量控制 算法,徹底克服丟步的問題,大幅提升電機高低速性能和力矩使用率,有效降低電機發熱,從而提升 機器的加工效率和精度,降低能耗。不光可以去驅動伺服電機,亦可驅動不僅閉環電機及開環電機, 是三位一體高集成度的交流驅動器。其成本較傳統交流伺服系統有明顯優勢。
產品特點
√ 采用全新32位電機控制專用DSP芯片;
√ 根據負載智能調節電流;
√ 可驅動86系列閉環電機;
√ 光耦隔離差分信號輸入;
√ 脈沖響應頻率最高可達1MHZ;
√細分設定可為200~60000之間的任意數;
√ 具有過流、過壓、跟蹤誤差超差等保護;
√ 四位數碼管顯示,可方便設置控制參數與監視電機運行狀態。
產品保護
顯示A001:無電機。
顯示A002:過熱保護。
顯示A003:過流保護。
顯示A004:模塊保護。
顯示A005:驅動器2無電機。
顯示A006:驅動器2過熱保護。
顯示A007:驅動器2過流保護。
顯示A008:驅動器2模塊保護。
顯示A020:未檢測到編碼器。
顯示A021:未檢測到編碼器零位信號。
顯示A022:電機轉動方向錯誤。
顯示A023:電機堵轉,編碼器錯誤。
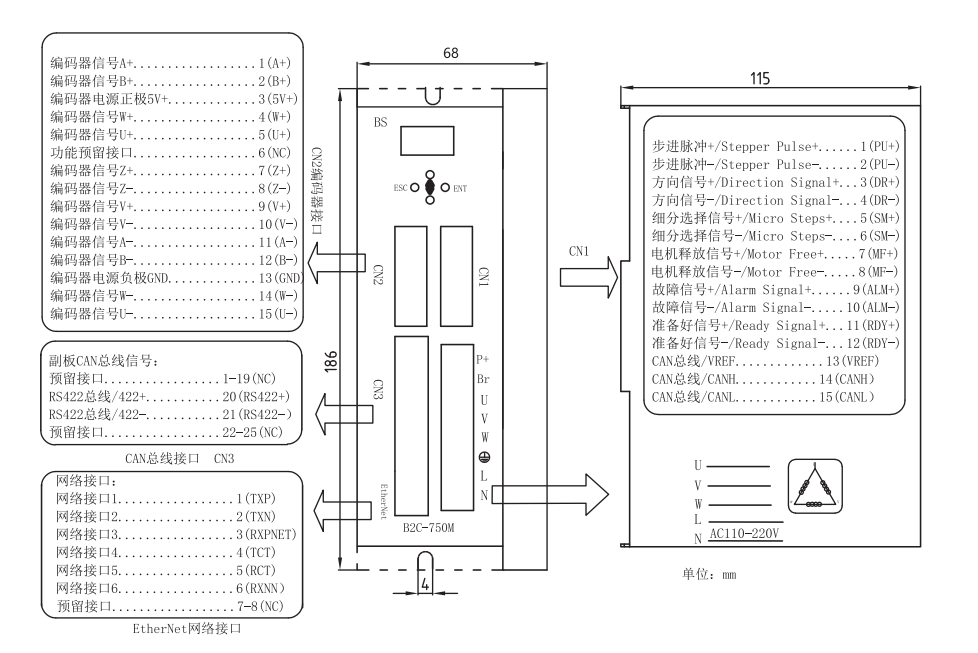
尺寸說明
產品參數
NO. 符號 名稱和功能 初始值 單位 設定范圍 0 BS00 設定電機運行電流 1000 毫安 1000=1A 2400=2.4A 1 BS01 設定電機鎖機電流 20 運行電流的20% 2 BS02 第一組細分數。當SM輸入信號為高電平時選擇此細分數。初始值200, 200 脈沖/轉 200脈沖/轉-60000脈沖/轉 3 BS03 第二細分數。當 SM輸入信號為低電平時選擇此細分數 脈沖/轉 4 BS04 脈沖輸入模式。用于選擇脈沖串輸入信號的波形
0000:步進正/反轉脈沖控制模式,上升沿有效
0001:步進脈沖+方向控制模式,上升沿有效
0002:步進正/反轉脈沖控制模式,下降沿有效
0003:步進脈沖+方向控制模式,下降沿有效(默認)
0004:內部IO電平控制,可正反轉,見附注1。
0005:內部IO脈沖控制,只能正轉,見附注2。
0008:通過串口方式控制電機轉動。
0011:CAN總線控制模式。
0021:通過FL和RDY輸出編碼器脈沖。
0100:步進增量伺服,正/反轉脈沖控制模式,上升沿有效
0101:步進增量伺服,脈沖+方向控制模式,上升沿有效
0102:步進增量伺服,正/反轉脈沖控制模式,下降沿有效
0103:步進增量伺服,脈沖+方向控制模式,下降沿有效
1000:編碼器工作于伺服狀態,正/反轉脈沖控制模式,上升沿有效。
1001:編碼器工作于伺服狀態,脈沖+方向控制模式,上升沿有效
1002:編碼器工作于伺服狀態,正/反轉脈沖控制模式,下降沿有效1003:編碼器工作于伺服狀態,脈沖+方向控制模式,下降沿有效
1004:特制程序的程序,詳見附注 4:
1003 0000-1003 5 BS05 設置KP參數 1200 20-2400 6 BS06 設置KI參數,范圍0~80.默認20. 20 0-80 NO. 符號 名稱和功能 7 BS07 電機內部測試。按鍵UP:正轉,DOWN:電機反轉,ENT:電機停止! 8 BS08 電機延時時間。=0:無延時,=X*62.5微妙, =16:延時1ms當BS04=0004或者05時,內部IO時電機加速度與此設置無關 9 BS09 保留,內部測試用 10 BS10 收到的正向脈沖個數,用于測試收到的脈沖個數是否正確 11 BS11 收到的反向脈沖個數,用于測試收到的脈沖個數是否正確 12 BS12 保留,暫時無用 13 BS13 內部脈沖時參數定義為電機啟動速度(0~0600轉/分鐘),當啟動速度高于運行速度時,自動默認為運行速度 14 BS14 內部脈沖時第一組細分時,SM=1時,參數定義為電機運行速度(1~3000轉/分鐘)。 15 BS15 內部脈沖時第二組細分時,SM=0時,參數定義為電機運行速度(1~3000轉/分鐘)。 16 BS16 內部脈沖時參數定義為實際轉動需要的脈沖個數低四位設定(0~9999)。 17 BS17 內部脈沖時參數定義為實際轉動需要的脈沖個數高四位設定(0K~9998)。9999自動定義為連續運轉,直至停止信號到來。 18 BS18 18ModelBus協議(詳見附注4),RS485串口專用,波特率設置,目前固定波特率9600 bit/s 19 BS19 ModelBus協議,RS485串口專用,地址設定范圍1~31(16進制為0x01~0x1F,鍵盤顯示是10進制顯示,串口數據發送和接收均為16進制數據)一共31種,其余無效。該設定數值也是CAN總線控制時的ID數據來源,ID= XXXXX0XXXXX B,其中XXXXX即是BS19的設定值。例如BS19=0012,則CAN總線的ID=01100001100 B。該設定重啟后生效。 20 BS20 20 BS20內部IO運行時,設定電機的加速度大小。見附注3 21 BS21 21 BS21內部IO運行時,設定電機的減速度大小。見附注3 22 BS22 22 BS22 設定驅動器將要堵轉時,瞬時電流的增大倍數,范圍(10~30) 23 BS23 23 BS23設定驅動器電流增大穩定后,電流減小為設定值的速度,范圍(10~2048),數值越大,減小的速度越慢=2048時,電流增大后不再減小 24 BS24 BS24設置RDY和ALM信號的輸出電平。
BS24=0000:RDY低電平有效,ALM低電平有效。
BS24=0001:RDY低電平有效,ALM高電平有效。
BS24=0002:RDY高電平有效,ALM低電平有效。
BS24=0003(默認):RDY高電平有效,ALM高電平有效。驅動器準備好時,RDY輸出高電平;驅動器報警時,ALM輸出高電平。在CAN總線控制模式時(BS04=0011時),RDY信號是電磁閥解閥信號。電機啟動時RDY信號有效,電機停止時RDY信號無效。25 BS25 設置增量式編碼器的線對數,(1000~10000),線對數為10000時屏幕顯示A000。 26 BS26 設置編碼器運行的方向,0:正向增加。1:反向增加 NO. 符號 名稱和功能 設置范圍 推薦范圍 27 BS27 設置玻璃到來時啟動電機旋轉的閾值,當編碼器的角度值偏離此數值時,電機開始移動,數值越小靈敏度越高,但有可能導致誤動作,數值越大,不會出現誤動作,有可能會導致電機扭矩太大損壞玻璃,實際根據需要設置。 3~50 5~20 28 BS28 設置電機觸碰到玻璃后的停止閾值根據需要設置,設置要求同BS27。 3~50 10~20 29 BS29 設置編碼器角度發生變化的閾值,即玻璃結束時編碼器角度的閾值,根據此數值向上位機發送編碼器當前的角度數據,該數值應當小于BS28設置的數據,例如BS28=15時,BS29=11 3~50 10~15 30 BS30 暫時不用 31 BS31 設置RDY輸出電平變化時編碼器的閾值,即玻璃過去后,當電機返回到此位置時RDY信號變為無效狀態 32 BS32 電機零位位置微調整,按UP鍵零位正向前進0.5個編碼器分辨率,按DOWN鍵則反向前進0.5個編碼器分辨率 33 BS33 BS33:顯示RDY信號保持的時間。其中1個分辨率表示0.25ms,比如當BS33顯示值為1000時,表示在上一運行周期RDY有效的時間是0.25s,當數值超過9999時,則只顯示后四位 34 BS34 設置玻璃到來時,電機直接移動的距離值 NO. 符號 名稱和功能 40 BS40 驅動器2的運行電流,定義同驅動器1 41 BS41 驅動器2的鎖機電流,定義同驅動器1 42 BS42 驅動器2第一組細分數,定義同驅動器1 43 BS43 驅動器2第二組細分數,定義同驅動器 44 BS44 驅動器2脈沖輸入方式,暫不可修改,與驅動器1相同 45 BS45 驅動器2的KP參數,定義同驅動器1 46 BS46 驅動器2的KI參數,定義同驅動器1 47 BS47 驅動器2內部測試,定義同驅動器1 48 BS48 驅動器2電機延時時間,定義同驅動器1
附注 1: (BS04=0004:內部 IO 電平控制, 可正反轉)
a) IO 控制時,當檢測到 PU 為低時電機正轉,變為高電平時電機停止;當檢測到 DR 為低時電機反轉,變為高電平時 電機停止。只有電機停穩后啟動信號才有效。
b) SM 信號功能有效,可以選擇速度最大值。
c) 當 BS04 設定為 0004 時,電機上電將顯示電機目前實際運行速度,單位
d) MF 信號作為中斷信號處理,當檢測到高電平時電機中斷動作。
e) 轉/分。
附注 2: (BS04= 0005:內部 IO 脈沖控制, 只能正轉)
a) IO 控制時,DR 的上升沿電機立即停止。
b) 當 DR 信號無效時,PU 作為電機啟動信號, 當電機停止時,如果 PU 有沿面變化(上升沿)時,則電機啟動運行, 直到走完設定的脈沖數或者當DR 變為有效時則電機停止。
c) 每來一個 PU 啟動信號時,電機正轉,該設定電機不能反轉。
d) MF 信號作為中斷信號處理,當檢測到高電平時電機中斷動作,電機急停。
e) SM 信號,作為運行速度控制信號,SM=1 時選擇第一運行速度,SM=0 時選擇第二運行速度。
f) 當 BS04 設定為 0005 時,電機上電將顯示電機目前實際運行速度,單位轉/分。
深圳市白山機電一體化技術有限公司 WWW.BSJD.COM
附注 3:
a) 當采用 IO 控制方式時(即 BS04=0004 或 0005 時)BS20 代表電機的加速度,數值越大,加速度越大,數值越小, 加速度越小,單位為 10轉/分/秒。min為 1,max為 5000。
b) 例如當 BS20=1000 時,其加速度大小相當于電機在 1 秒內速度從 0加速到 10000 轉/分。當設置為 1 時,則相當 于電機的速度每秒種增加 10 轉/分。實際使用時根據需要設置合適值。
c) BS21 的數值代表電機減速曲線,其定義同加速值。
附注 4:BS04=1004,特殊定制程序
a) 所有參數都暫時只能通過串口通訊來設置,編碼器線對數固定為 2500 線,暫時不可設置。
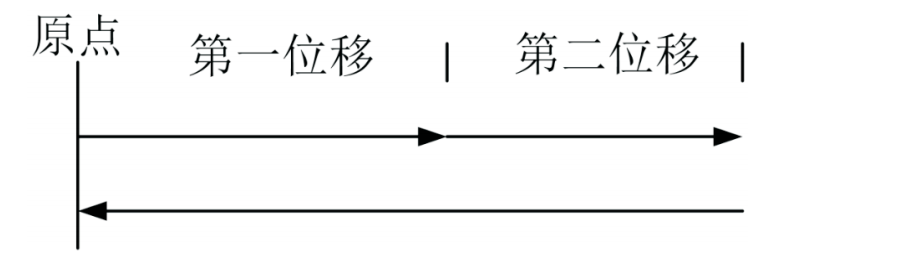
b) 電機上電后,通過 BS00 設置電機的工作電流,在 PU 信號的上升沿開始執行磨玻璃的程序,首先直接運行 第一位移,第一位移完成之后開始第二位移,第二位移一邊移動一邊檢測電機的力矩大小,當力矩達到設定的 力矩后電機迅速的返回到原點,返回速度與第一位移的運行速度一致,然后等待下一次啟動命令。如果力矩一 直沒達到設定的力矩,則將第二位移走完后電機也會返回到原點。
c) DR 信號為直接返回到原點命令,如果檢測到 DR 信號的上升沿,則電機直接返回到原點。
d) 可設置的參數包括:第一位移運行速度,第一位移運行的位移,第二位移運行速度,第二位移允許的最大距 離,設定返回的力矩大小。該力矩的大小為相對值,并不是絕對值,范圍為 10~1200,實際調試時根據現場先 從小依次調大,如果電流發生改變,該數值需要隨之改變。 e) 第一位移和第二位移的速度暫定是沒有加減速的。
產品資料大小B2C-750M.pdf2,264.8KB產品詳情尺寸說明性能參數資料下載產品概述
B2C-750混合伺服驅動器是最新研制的全數字式混合伺服驅動器,采用先進的超前角及矢量控制 算法,徹底克服丟步的問題,大幅提升電機高低速性能和力矩使用率,有效降低電機發熱,從而提升 機器的加工效率和精度,降低能耗。不光可以去驅動伺服電機,亦可驅動不僅閉環電機及開環電機, 是三位一體高集成度的交流驅動器。其成本較傳統交流伺服系統有明顯優勢。
產品特點
√ 采用全新32位電機控制專用DSP芯片;
√ 根據負載智能調節電流;
√ 可驅動86系列閉環電機;
√ 光耦隔離差分信號輸入;
√ 脈沖響應頻率最高可達1MHZ;
√細分設定可為200~60000之間的任意數;
√ 具有過流、過壓、跟蹤誤差超差等保護;
√ 四位數碼管顯示,可方便設置控制參數與監視電機運行狀態。
產品保護
顯示A001:無電機。
顯示A002:過熱保護。
顯示A003:過流保護。
顯示A004:模塊保護。
顯示A005:驅動器2無電機。
顯示A006:驅動器2過熱保護。
顯示A007:驅動器2過流保護。
顯示A008:驅動器2模塊保護。
顯示A020:未檢測到編碼器。
顯示A021:未檢測到編碼器零位信號。
顯示A022:電機轉動方向錯誤。
顯示A023:電機堵轉,編碼器錯誤。
尺寸說明
產品參數
NO. 符號 名稱和功能 初始值 單位 設定范圍 0 BS00 設定電機運行電流 1000 毫安 1000=1A 2400=2.4A 1 BS01 設定電機鎖機電流 20 運行電流的20% 2 BS02 第一組細分數。當SM輸入信號為高電平時選擇此細分數。初始值200, 200 脈沖/轉 200脈沖/轉-60000脈沖/轉 3 BS03 第二細分數。當 SM輸入信號為低電平時選擇此細分數 脈沖/轉 4 BS04 脈沖輸入模式。用于選擇脈沖串輸入信號的波形
0000:步進正/反轉脈沖控制模式,上升沿有效
0001:步進脈沖+方向控制模式,上升沿有效
0002:步進正/反轉脈沖控制模式,下降沿有效
0003:步進脈沖+方向控制模式,下降沿有效(默認)
0004:內部IO電平控制,可正反轉,見附注1。
0005:內部IO脈沖控制,只能正轉,見附注2。
0008:通過串口方式控制電機轉動。
0011:CAN總線控制模式。
0021:通過FL和RDY輸出編碼器脈沖。
0100:步進增量伺服,正/反轉脈沖控制模式,上升沿有效
0101:步進增量伺服,脈沖+方向控制模式,上升沿有效
0102:步進增量伺服,正/反轉脈沖控制模式,下降沿有效
0103:步進增量伺服,脈沖+方向控制模式,下降沿有效
1000:編碼器工作于伺服狀態,正/反轉脈沖控制模式,上升沿有效。
1001:編碼器工作于伺服狀態,脈沖+方向控制模式,上升沿有效
1002:編碼器工作于伺服狀態,正/反轉脈沖控制模式,下降沿有效1003:編碼器工作于伺服狀態,脈沖+方向控制模式,下降沿有效
1004:特制程序的程序,詳見附注 4:
1003 0000-1003 5 BS05 設置KP參數 1200 20-2400 6 BS06 設置KI參數,范圍0~80.默認20. 20 0-80 NO. 符號 名稱和功能 7 BS07 電機內部測試。按鍵UP:正轉,DOWN:電機反轉,ENT:電機停止! 8 BS08 電機延時時間。=0:無延時,=X*62.5微妙, =16:延時1ms當BS04=0004或者05時,內部IO時電機加速度與此設置無關 9 BS09 保留,內部測試用 10 BS10 收到的正向脈沖個數,用于測試收到的脈沖個數是否正確 11 BS11 收到的反向脈沖個數,用于測試收到的脈沖個數是否正確 12 BS12 保留,暫時無用 13 BS13 內部脈沖時參數定義為電機啟動速度(0~0600轉/分鐘),當啟動速度高于運行速度時,自動默認為運行速度 14 BS14 內部脈沖時第一組細分時,SM=1時,參數定義為電機運行速度(1~3000轉/分鐘)。 15 BS15 內部脈沖時第二組細分時,SM=0時,參數定義為電機運行速度(1~3000轉/分鐘)。 16 BS16 內部脈沖時參數定義為實際轉動需要的脈沖個數低四位設定(0~9999)。 17 BS17 內部脈沖時參數定義為實際轉動需要的脈沖個數高四位設定(0K~9998)。9999自動定義為連續運轉,直至停止信號到來。 18 BS18 18ModelBus協議(詳見附注4),RS485串口專用,波特率設置,目前固定波特率9600 bit/s 19 BS19 ModelBus協議,RS485串口專用,地址設定范圍1~31(16進制為0x01~0x1F,鍵盤顯示是10進制顯示,串口數據發送和接收均為16進制數據)一共31種,其余無效。該設定數值也是CAN總線控制時的ID數據來源,ID= XXXXX0XXXXX B,其中XXXXX即是BS19的設定值。例如BS19=0012,則CAN總線的ID=01100001100 B。該設定重啟后生效。 20 BS20 20 BS20內部IO運行時,設定電機的加速度大小。見附注3 21 BS21 21 BS21內部IO運行時,設定電機的減速度大小。見附注3 22 BS22 22 BS22 設定驅動器將要堵轉時,瞬時電流的增大倍數,范圍(10~30) 23 BS23 23 BS23設定驅動器電流增大穩定后,電流減小為設定值的速度,范圍(10~2048),數值越大,減小的速度越慢=2048時,電流增大后不再減小 24 BS24 BS24設置RDY和ALM信號的輸出電平。
BS24=0000:RDY低電平有效,ALM低電平有效。
BS24=0001:RDY低電平有效,ALM高電平有效。
BS24=0002:RDY高電平有效,ALM低電平有效。
BS24=0003(默認):RDY高電平有效,ALM高電平有效。驅動器準備好時,RDY輸出高電平;驅動器報警時,ALM輸出高電平。在CAN總線控制模式時(BS04=0011時),RDY信號是電磁閥解閥信號。電機啟動時RDY信號有效,電機停止時RDY信號無效。25 BS25 設置增量式編碼器的線對數,(1000~10000),線對數為10000時屏幕顯示A000。 26 BS26 設置編碼器運行的方向,0:正向增加。1:反向增加 NO. 符號 名稱和功能 設置范圍 推薦范圍 27 BS27 設置玻璃到來時啟動電機旋轉的閾值,當編碼器的角度值偏離此數值時,電機開始移動,數值越小靈敏度越高,但有可能導致誤動作,數值越大,不會出現誤動作,有可能會導致電機扭矩太大損壞玻璃,實際根據需要設置。 3~50 5~20 28 BS28 設置電機觸碰到玻璃后的停止閾值根據需要設置,設置要求同BS27。 3~50 10~20 29 BS29 設置編碼器角度發生變化的閾值,即玻璃結束時編碼器角度的閾值,根據此數值向上位機發送編碼器當前的角度數據,該數值應當小于BS28設置的數據,例如BS28=15時,BS29=11 3~50 10~15 30 BS30 暫時不用 31 BS31 設置RDY輸出電平變化時編碼器的閾值,即玻璃過去后,當電機返回到此位置時RDY信號變為無效狀態 32 BS32 電機零位位置微調整,按UP鍵零位正向前進0.5個編碼器分辨率,按DOWN鍵則反向前進0.5個編碼器分辨率 33 BS33 BS33:顯示RDY信號保持的時間。其中1個分辨率表示0.25ms,比如當BS33顯示值為1000時,表示在上一運行周期RDY有效的時間是0.25s,當數值超過9999時,則只顯示后四位 34 BS34 設置玻璃到來時,電機直接移動的距離值 NO. 符號 名稱和功能 40 BS40 驅動器2的運行電流,定義同驅動器1 41 BS41 驅動器2的鎖機電流,定義同驅動器1 42 BS42 驅動器2第一組細分數,定義同驅動器1 43 BS43 驅動器2第二組細分數,定義同驅動器 44 BS44 驅動器2脈沖輸入方式,暫不可修改,與驅動器1相同 45 BS45 驅動器2的KP參數,定義同驅動器1 46 BS46 驅動器2的KI參數,定義同驅動器1 47 BS47 驅動器2內部測試,定義同驅動器1 48 BS48 驅動器2電機延時時間,定義同驅動器1
附注 1: (BS04=0004:內部 IO 電平控制, 可正反轉)
a) IO 控制時,當檢測到 PU 為低時電機正轉,變為高電平時電機停止;當檢測到 DR 為低時電機反轉,變為高電平時 電機停止。只有電機停穩后啟動信號才有效。
b) SM 信號功能有效,可以選擇速度最大值。
c) 當 BS04 設定為 0004 時,電機上電將顯示電機目前實際運行速度,單位
d) MF 信號作為中斷信號處理,當檢測到高電平時電機中斷動作。
e) 轉/分。
附注 2: (BS04= 0005:內部 IO 脈沖控制, 只能正轉)
a) IO 控制時,DR 的上升沿電機立即停止。
b) 當 DR 信號無效時,PU 作為電機啟動信號, 當電機停止時,如果 PU 有沿面變化(上升沿)時,則電機啟動運行, 直到走完設定的脈沖數或者當DR 變為有效時則電機停止。
c) 每來一個 PU 啟動信號時,電機正轉,該設定電機不能反轉。
d) MF 信號作為中斷信號處理,當檢測到高電平時電機中斷動作,電機急停。
e) SM 信號,作為運行速度控制信號,SM=1 時選擇第一運行速度,SM=0 時選擇第二運行速度。
f) 當 BS04 設定為 0005 時,電機上電將顯示電機目前實際運行速度,單位轉/分。
深圳市白山機電一體化技術有限公司 WWW.BSJD.COM
附注 3:
a) 當采用 IO 控制方式時(即 BS04=0004 或 0005 時)BS20 代表電機的加速度,數值越大,加速度越大,數值越小, 加速度越小,單位為 10轉/分/秒。min為 1,max為 5000。
b) 例如當 BS20=1000 時,其加速度大小相當于電機在 1 秒內速度從 0加速到 10000 轉/分。當設置為 1 時,則相當 于電機的速度每秒種增加 10 轉/分。實際使用時根據需要設置合適值。
c) BS21 的數值代表電機減速曲線,其定義同加速值。
附注 4:BS04=1004,特殊定制程序
a) 所有參數都暫時只能通過串口通訊來設置,編碼器線對數固定為 2500 線,暫時不可設置。
b) 電機上電后,通過 BS00 設置電機的工作電流,在 PU 信號的上升沿開始執行磨玻璃的程序,首先直接運行 第一位移,第一位移完成之后開始第二位移,第二位移一邊移動一邊檢測電機的力矩大小,當力矩達到設定的 力矩后電機迅速的返回到原點,返回速度與第一位移的運行速度一致,然后等待下一次啟動命令。如果力矩一 直沒達到設定的力矩,則將第二位移走完后電機也會返回到原點。
c) DR 信號為直接返回到原點命令,如果檢測到 DR 信號的上升沿,則電機直接返回到原點。
d) 可設置的參數包括:第一位移運行速度,第一位移運行的位移,第二位移運行速度,第二位移允許的最大距 離,設定返回的力矩大小。該力矩的大小為相對值,并不是絕對值,范圍為 10~1200,實際調試時根據現場先 從小依次調大,如果電流發生改變,該數值需要隨之改變。 e) 第一位移和第二位移的速度暫定是沒有加減速的。
產品資料大小更新日期B2C-750M.pdf 選擇區號
選擇區號
 瀏覽器自帶分享功能也很好用哦~?
瀏覽器自帶分享功能也很好用哦~?復制成功
×



 瀏覽器自帶分享功能也很好用哦~
瀏覽器自帶分享功能也很好用哦~